
Learning Scheduling Algorithms for Data Processing Clusters
Hongzi Mao, Malte Schwarzkopf, Shaileshh Bojja Venkatakrishnan, Zili Meng
⋆
, Mohammad Alizadeh
MIT Computer Science and Artificial Intelligence Laboratory
⋆
Tsinghua University
{hongzi,malte,bjjvnkt,alizadeh}@csail.mit.edu,[email protected]
Abstract
Efficiently scheduling data processing jobs on distributed compute
clusters requires complex algorithms. Current systems use simple,
generalized heuristics and ignore workload characteristics, since
developing and tuning a scheduling policy for each workload is infea-
sible. In this paper, we show that modern machine learning techniques
can generate highly-efficient policies automatically.
Decima uses reinforcement learning (RL) and neural networks to
learn workload-specific scheduling algorithms without any human
instruction beyond a high-level objective, such as minimizing average
job completion time. However, off-the-shelf RL techniques cannot
handle the complexity and scale of the scheduling problem. To build
Decima, we had to develop new representations for jobs’ dependency
graphs, design scalable RL models, and invent RL training methods
for dealing with continuous stochastic job arrivals.
Our prototype integration with Spark on a 25-node cluster shows
that Decima improves average job completion time by at least 21%
over hand-tuned scheduling heuristics, achieving up to 2
×
improve-
ment during periods of high cluster load.
CCS Concepts: Software and its engineering →
Scheduling;
Networks →
Network resources allocation;
Computing methodologies →
Reinforcement
learning
Keywords: resource management, job scheduling, reinforcement learning
ACM Reference Format:
HongziMao,MalteSchwarzkopf,ShaileshhBojjaVenkatakrishnan, Zili Meng
and Mohammad Alizadeh. 2019. Learning Scheduling Algorithms for Data
Processing Clusters. In SIGCOMM ’19, August 19-23, 2019, Beijing, China.
ACM, Beijing, China, 19 pages. https://doi.org/10.1145/3341302.3342080
1 Introduction
Efficient utilization of expensive compute clusters matters for enter-
prises: even small improvements in utilization can save millions of
dollars at scale [
11
, §1.2]. Cluster schedulers are keyto realizing these
savings. A good scheduling policy packs work tightly to reduce frag-
mentation [
34
,
36
,
76
], prioritizes jobs according to high-level metrics
such as user-perceived latency [
77
], and avoids inefficient configura-
tions [
28
]. Current cluster schedulers rely on heuristics that prioritize
generality, ease of understanding, and straightforward implementa-
tion over achieving the ideal performance on a specific workload. By
using general heuristics like fair scheduling [
8
,
31
], shortest-job-first,
Permission to make digital or hard copies of all or part of this work for personal or
classroom use is granted without fee provided that copies are not made or distributed
for profit or commercial advantage and that copies bear this notice and the full citation
on the first page. Copyrights for components of this work owned by others than ACM
must be honored. Abstracting with credit is permitted. To copy otherwise, or republish,
to post on servers or to redistribute to lists, requires prior specific permission and/or a
SIGCOMM ’19, August 19-23, 2019, Beijing, China
© 2019 Association for Computing Machinery.
ACM ISBN 978-1-4503-5956-6/19/08. . . $15.00
https://doi.org/10.1145/3341302.3342080
and simple packing strategies [
34
], current systems forego potential
performance optimizations. For example, widely-used schedulers
ignore readily available information about job structure (i.e., internal
dependencies) and efficient parallelism for jobs’ input sizes. Unfortu-
nately,workload-specific scheduling policies that use this information
require expert knowledge and significant effort to devise, implement,
and validate. For many organizations, these skills are either unavail-
able, or uneconomic as the labor cost exceeds potential savings.
In this paper, we show that modern machine-learning techniques
can help side-step this trade-off by automatically learning highly
efficient, workload-specific scheduling policies. We present Decima
1
,
a general-purpose scheduling service for data processing jobs with
dependent stages. Many systems encode job stages and their depen-
dencies as directed acyclicgraphs (DAGs) [
10
,
19
,
42
,
80
]. Efficiently
scheduling DAGs leads to hard algorithmic problems whose optimal
solutions are intractable [
36
]. Given only a high-level goal (e.g., mini-
mize average job completion time), Decima uses existing monitoring
information and past workload logs to automatically learn sophisti-
cated scheduling policies. For example, instead of a rigid fair sharing
policy, Decima learns to give jobs different shares of resources to
optimize overall performance, and it learns job-specific parallelism
levels that avoid wasting resources on diminishing returns for jobs
with little inherent parallelism. The right algorithms and thresholds
for these policies are workload-dependent, and achieving them today
requires painstaking manual scheduler customization.
Decima learns scheduling policies through experience using mod-
ern reinforcement learning (RL) techniques. RL is well-suited to
learning scheduling policies because it allows learning from actual
workload and operating conditions without relying on inaccurate as-
sumptions. Decima encodes its scheduling policy in a neural network
trained via a large number of simulated experiments, during which it
schedules a workload, observes the outcome, and gradually improves
its policy. However, Decima’s contributiongoes beyondmerely apply-
ing off-the-shelf RL algorithms to scheduling: to successfully learn
high-quality scheduling policies, we had to develop novel data and
scheduling action representations, and new RL training techniques.
First, cluster schedulers must scale to hundreds of jobs and thou-
sands of machines, and must decide among potentially hundreds of
configurations per job (e.g., different levels of parallelism). This leads
to much larger problem sizes compared to conventional RL applica-
tions (e.g., game-playing [
61
,
70
], robotics control [
51
,
67
]), both
in the amount of information available to the scheduler (the state
space), and the number of possible choices it must consider (the ac-
tion space).
2
We designed a scalable neural network architecture that
combines a graph neural network [
12
,
23
,
24
,
46
] to process job and
cluster information without manual feature engineering, and a policy
1
In Roman mythology, Decima measures threads of life and decides their destinies.
2
For example, the state of the game of Go [
71
] can be represented by
19 × 19 = 361
numbers, which also bound the number of legal moves per turn.
SIGCOMM ’19, August 19-23, 2019, Beijing, China H. Mao et al.
network that makes scheduling decisions. Our neural networks reuse
a small set of building block operations to process job DAGs, irre-
spective of their sizes and shapes, and to make scheduling decisions,
irrespective of the number of jobs or machines. These operations are
parameterized functions learned during training, and designed for the
scheduling domain — e.g., ensuring that the graph neural network
can express properties such as a DAG’s critical path. Our neural net-
work design substantially reduces model complexity compared to
naive encodings of the scheduling problem, which is key to efficient
learning, fast training, and low-latency scheduling decisions.
Second, conventional RL algorithms cannot train models with con-
tinuous streaming job arrivals. The randomness of job arrivals can
make it impossible for RL algorithms to tell whether the observed
outcome of two decisions differs due to disparate job arrival patterns,
or due to the quality the policy’s decisions. Further, RL policies nec-
essarily make poor decisions in early stages of training. Hence, with
an unbounded stream of incoming jobs, the policy inevitably accu-
mulates a backlog of jobs from which it can never recover. Spending
significant training time exploring actions in such situations fails to
improve the policy. To deal with the latter problem, we terminate train-
ing “episodes” early in the beginning, and gradually grow their length.
This allows the policy to learn to handle simple, short job sequences
first, and to then graduate to more challenging arrival sequences. To
cope with the randomness of job arrivals, we condition training feed-
back on the actual sequence of job arrivals experienced, using a recent
technique for RL in environments with stochastic inputs [
55
]. This
isolates the contribution of the scheduling policy in the feedback and
makes it feasible to learn policies that handle stochastic job arrivals.
We integrated Decima with Spark and evaluated it in both an exper-
imental testbed and on a workload trace from Alibaba’s production
clusters [
6
,
52
].
3
Our evaluation shows that Decima outperforms ex-
isting heuristics on a 25-node Spark cluster, reducing average job
completion time of TPC-H query mixes by at least 21%. Decima’s
policies are particularly effective during periods of high cluster load,
where it improves the job completion time by up to 2
×
over exist-
ing heuristics. Decima also extends to multi-resource scheduling of
CPU and memory, where it improves average job completion time by
32-43% over prior schemes such as Graphene [36].
In summary, we make the following key contributions:
(1)
A scalable neural network design that can process DAGs of ar-
bitrary shapes and sizes, schedule DAG stages, and set efficient
parallelism levels for each job (§5.1–§5.2).
(2)
A set of RL training techniques that for the first time enable
training a scheduler to handle unbounded stochastic job arrival
sequences (§5.3).
(3)
Decima, the first RL-based scheduler that schedules complex data
processing jobs and learns workload-specific scheduling policies
without human input, and a prototype implementation of it (§6).
(4)
An evaluation of Decima in simulation and in a real Spark cluster,
and a comparison with state-of-the-art scheduling heuristics (§7).
2 Motivation
Dataprocessingsystems and query compilers suchasHive, Pig, Spark-
SQL, and DryadLINQ create DAG-structured jobs, which consist of
processing stages connected by input/output dependencies (Figure 1).
3
We used an earlier version of Alibaba’s public cluster-trace-v2018 trace.
1 50 100
1 5 10 20
1 50 100 200
Number of tasks
Duration (sec)
Data shuffle (MB)
1
50
100
200
1
5
10
20
1 50 100
Query 21
Query 20
Query 17
Query 8
Query 2
Figure 1:
Data-parallel jobs have complex data-flow graphs like the ones
shown (TPC-H queries in Spark), with each node having a distinct number
of tasks, task durations, and input/output sizes.
For recurring jobs, which are common in production clusters [
4
],
reasonable estimates of runtimes and intermediate data sizes may be
available. Most cluster schedulers, however, ignore this job structure
in their decisions and rely on e.g., coarse-grained fair sharing [
8
,
16
,
31
,
32
], rigid priority levels [
77
], and manual specification of each
job’sparallelism [
68
,§5]. Existing schedulerschooseto largely ignore
this rich, easily-available job structure information because it is diffi-
cult to design scheduling algorithms that make use of it. We illustrate
the challenges of using job-specific information in scheduling deci-
sions with two concrete examples: (i) dependency-aware scheduling,
and (ii) automatically choosing the right number of parallel tasks.
2.1 Dependency-aware task scheduling
Many job DAGs in practice have tens or hundreds of stages with
different durations and numbers of parallel tasks in a complex depen-
dency structure. An ideal schedule ensures that independent stages
run in parallel as much as possible, and that no stage ever blocks on
a dependency if there are available resources. Ensuring this requires
the scheduler to understand the dependency structure and plan ahead.
This “DAG scheduling problem” is algorithmically hard: see, e.g.,
the illustrative example by Grandl et al. [
36
, §2.2] and the one we
describe in detail in Appendix A. Theoretical research [
18
,
20
,
48
,
69
]
has focused mostly on simple instances of the problem that do not cap-
ture the complexity of real data processing clusters (e.g., online job
arrivals, multiple DAGs, multiple tasks per stage, jobs with different
inherent parallelism, overheads for moving jobs between machines,
etc.). For example, in a recent paper, Agrawal et al. [
5
] showed that
two simple DAG scheduling policies (shortest-job-first and latest-
arrival-processor-sharing) have constant competitive ratio in a basic
model with one task per job stage. As our results show (§2.3, §7),
these policies are far from optimal in a real Spark cluster.
Hence, designing an algorithm to generate optimal schedules for
all possible DAG combinations is intractable [
36
,
57
]. Existing sched-
ulers ignore this challenge: they enqueue tasks from a stage as soon
as it becomes available, or run stages in an arbitrary order.
2.2 Setting the right level of parallelism
In addition to understanding dependencies, an ideal scheduler must
also understand how to best split limited resources among jobs. Jobs
vary in the amount of data that they process, and in the amount of
parallel work available. A job with large input or large intermediate
data can efficiently harness additional parallelism; by contrast, a job
running on small input data, or one with less efficiently parallelizable
operations, sees diminishing returns beyond modest parallelism.

Learning Scheduling Algorithms for Data Processing Clusters SIGCOMM ’19, August 19-23, 2019, Beijing, China
0 10 20 30 40 50 60 70 80 90 100
Degree of parallelism
0
100
200
300
Job runtime [sec]
Q9, 2 GB
Q9, 100 GB
Q2, 100 GB
Figure 2:
TPC-H queries scale differently with parallelism: Q9 on a 100 GB
input sees speedups up to 40 parallel tasks, while Q2 stops gaining at 20 tasks;
Q9 on a 2 GB input needs only 5 tasks. Picking “sweet spots” on these curves
for a mixed workload is difficult.
Figure 2 illustrates this with the job runtime of two TPC-H [
73
]
queries running on Spark as they are given additional resources to run
more parallel tasks. Even when both process 100 GB of input, Q2 and
Q9 exhibit widely different scalability: Q9 sees significant speedup
up to 40 parallel tasks, while Q2 only obtains marginal returns beyond
20 tasks. When Q9 runs on a smaller input of 2 GB, however, it needs
no more than ten parallel tasks. For all jobs, assigning additional par-
allel tasks beyond a “sweet spot” in the curve adds only diminishing
gains. Hence, the scheduler should reason about which job will see
the largest marginal gain from extra resources and accordingly pick
the sweet spot for each job.
Existing schedulers largely side-step this problem. Most burden
the user with the choice of how many parallel tasks to use [
68
, §5], or
rely on a separate “auto-scaling” component based on coarse heuris-
tics [
9
,
28
]. Indeed, many fair schedulers [
31
,
43
] divide resources
without paying attention to their decisions’ efficiency: sometimes, an
“unfair” schedule results in a more efficient overall execution.
2.3 An illustrative example on Spark
The aspects described are just two examples of how schedulers can
exploit knowledge of the workload. To achieve the best performance,
schedulers must also respect other considerations, such as the exe-
cution order (e.g., favoring short jobs) and avoiding resource frag-
mentation [
34
,
77
]. Considering all these dimensions together — as
Decima does — makes a substantial difference. We illustrate this by
running a mix of ten randomly chosen TPC-H [
73
] queries with input
sizes drawn from a long-tailed distribution on a Spark cluster with
50 parallel task slots.
4
Figure 3 visualizes the schedules imposed
by (a) Spark’s default FIFO scheduling; (b) a shortest-job-first (SJF)
policy that strictly prioritizes short jobs; (c) a more realistic, fair
scheduler that dynamically divides task slots between jobs; and (d)
a scheduling policy learned by Decima. We measure average job
completion time (JCT) over the ten jobs. Having access to the graph
structure helps Decima improve average JCT by 45% over the naive
FIFO scheduler, and by 19% over the fair scheduler. It achieves this
speedup by completing short jobs quickly, as five jobs finish in the
first 40 seconds; and by maximizing parallel-processing efficiency.
SJF dedicates all task slots to the next-smallest job in order to finish
it early (but inefficiently); by contrast, Decima runs jobs near their
parallelism sweet spot. By controlling parallelism, Decima reduces
4
See §7 for details of the workload and our cluster setup.
the total time to complete all jobs by 30% compared to SJF. Further,
unlike fair scheduling, Decima partitions task slots non-uniformly
across jobs, improving average JCT by 19%.
Designing general-purpose heuristics to achieve these benefits is
difficult, as each additional dimension (DAG structure, parallelism,
job sizes, etc.) increases complexity and introduces new edge cases.
Decima opens up a new option: using data-driven techniques, it auto-
matically learns workload-specific policies that can reap these gains.
Decima does so without requiring human guidance beyond a high-
level goal (e.g., minimal average JCT), and without explicitly mod-
eling the system or the workload.
3 The DAG Scheduling Problem in Spark
Decima is a general framework for learning scheduling algorithms
for DAG-structured jobs. For concreteness, we describe its design in
the context of the Spark system.
A Spark job consists of a DAG whose nodes are the execution
stages of the job. Each stage represents an operation that the system
runs in parallel over many shards of the stage’s input data. The inputs
are the outputs of one or more parent stages, and each shard is pro-
cessed by a single task. A stage’s tasks become runnable as soon as
all parent stages have completed. How many tasks can run in parallel
depends on the number of executors that the job holds. Usually, a stage
has more tasks than there are executors, and the tasks therefore run in
several “waves”. Executors are assigned by the Spark master based on
user requests, and by default stick to jobs until they finish. However,
Spark also supports dynamic allocation of executors based on the wait
time of pending tasks [
9
], although moving executors between jobs
incurs some overhead (e.g., to tear down and launch JVMs).
Spark must therefore handle three kindsof scheduling decisions: (i)
deciding how many executors to give to each job; (ii) deciding which
stages’ tasks to run next for each job, and (iii) deciding which task to
run next when an executor becomes idle. When a stage completes, its
job’s DAG scheduler handles the activation of dependent child stages
and enqueues their tasks with a lower-level task scheduler. The task
scheduler maintains task queues from which it assigns a task every
time an executor becomes idle.
We allow the scheduler to move executors between job DAGs as it
seesfit (dynamic allocation). Decimafocuses on DAGscheduling (i.e.,
which stage torun next) and executor allocation(i.e., each job’s degree
of parallelism). Since tasks in a stage run identical code and request
identical resources, we use Spark’s existing task-level scheduling.
4 Overview and Design Challenges
Decima represents the scheduler as an agent that uses a neural network
to make decisions, henceforth referred to as the policy network. On
scheduling events — e.g., a stage completion (which frees up execu-
tors), or a job arrival (which adds a DAG) — the agent takes as input
the current state of the cluster and outputs a scheduling action. At a
high level, the state captures the status of the DAGs in the scheduler’s
queue and the executors, while the actions determine which DAG
stages executors work on at any given time.
Decima trains its neural network using RL through a large number
of offline (simulated) experiments. In these experiments, Decima
attempts to schedule a workload, observes the outcome, and provides
the agent with a reward after each action. The reward is set based
on Decima’s high-level scheduling objective (e.g., minimize average

SIGCOMM ’19, August 19-23, 2019, Beijing, China H. Mao et al.
Task slots
FIFO, avg. job duration 111.4 sec
Time (seconds)
0 200100 150
50
(a) FIFO scheduling.
Task slots
SJF, avg. job duration 81.7 sec
Time (seconds)
0 200100 150
50
(b) SJF scheduling.
Task slots
Fair, avg. job duration 74.9 sec
0 200100 150
50
Time (seconds)
(c) Fair scheduling.
Task slots
Decima, avg. job duration 61.1 sec
0 200100 150
50
Time (seconds)
(d) Decima.
Figure 3:
Decima improves average JCT of 10 random TPC-H queries by 45% over Spark’s FIFO scheduler, and by 19% over a fair scheduler on a cluster with
50 task slots (executors). Different queries in different colors; vertical red lines are job completions; purple means idle.
JCT). The RL algorithm uses this reward signal to gradually improve
the scheduling policy. Appendix B provides a brief primer on RL.
Decima’s RL framework (Figure 4) is general and it can be applied
to a varietyof systems and objectives.In §5, we describe the design for
scheduling DAGs on a set of identical executors to minimize average
JCT. Our results in §7 will show how to apply the same design to
schedule multiple resources (e.g., CPU and memory), optimize for
other objectives like makespan [
65
], and learn qualitatively different
polices depending on the underlying system (e.g., with different
overheads for moving jobs across machines).
Challenges. Decima’s design tackles three key challenges:
(1) Scalable state information processing.
The scheduler must con-
sider a large amount of dynamic information to make scheduling
decisions: hundreds of job DAGs, each with dozens of stages,
and executors that may each be in a different state (e.g., assigned
to different jobs). Processing all of this information via neural
networks is challenging, particularly because neural networks
usually require fixed-sized vectors as inputs.
(2) Huge space of scheduling decisions.
The scheduler must map
potentially thousands of runnable stages to available executors.
The exponentially large space of mappings poses a challenge for
RL algorithms, which must “explore” the action space in training
to learn a good policy.
(3) Training for continuous stochastic job arrivals
. It is important
to train the scheduler to handle continuous randomly-arriving
jobs over time. However, training with a continuous job arrival
process is non-trivial because RL algorithms typically require
training “episodes” with a finite time horizon. Further, we find
that randomness in the job arrival process creates difficulties for
RL training due to the variance and noise it adds to the reward.
5 Design
This section describes Decima’s design, structured according to how
it addresses the three aforementioned challenges: scalable processing
of the state information (§5.1), efficiently encoding scheduling deci-
sions as actions (§5.2), and RL training with continuous stochastic
job arrivals (§5.3).
5.1 Scalable state information processing
On each state observation, Decima must convert the state information
(job DAGs and executor status) into features to pass to its policy
network. One option is to create a flat feature vector containing all the
state information. However, this approach cannot scale to arbitrary
number of DAGs of arbitrary sizes and shapes. Further, even with
State
Job DAG 1 Job DAG n
Executor 1
Executor m
Scheduling Agent
p[
Policy
Network
(§5.2)
Graph
Neural
Network
(§5.1)
Environment
Schedulable
Nodes
Objective
Reward
Observation of jobs and cluster status
Figure 4:
In Decima’s RL framework, a scheduling agent observes the cluster
state to decide a scheduling action on the cluster environment, and receives a
reward based on a high-level objective. The agent uses a graph neural network
to turn job DAGs into vectors for the policy network, which outputs actions.
entity symbol entity symbol
job i per-node feature vector x
i
v
stage (DAG node) v per-node embedding e
i
v
node v ’s children ξ (v ) per-job embedding y
i
job i’s DAG G
i
global embedding z
job i’s parallelism l
i
node score q
i
v
non-linear functions f ,д,q, w parallelism score w
i
l
Table 1: Notation used throughout §5.
a hard limit on the number of jobs and stages, processing a high-
dimensional feature vector would require a large policy network that
would be difficult to train.
Decima achieves scalability using a graph neural network, which
encodes or “embeds” the state information (e.g., attributes of job
stages, DAG dependency structure, etc.) in a set of embedding vectors.
Our method is based on graph convolutional neural networks [
12
,
23
,
46] but customized for scheduling. Table 1 defines our notation.
The graph embedding takes as input the job DAGs whose nodes
carry a set of stage attributes (e.g., the number of remaining tasks,
expected task duration, etc.), and it outputs three different types of
embeddings:
(1)
per-node embeddings, which capture information about the node
and its children (containing, e.g., aggregated work along the crit-
ical path starting from the node);
(2)
per-jobembeddings, which aggregateinformation across an entire
job DAG (containing, e.g., the total work in the job); and
(3)
a global embedding, which combines information from all per-job
embeddings into a cluster-level summary (containing, e.g., the
number of jobs and the cluster load).
Importantly, what information to store in these embeddings is not
hard-coded — Decima automatically learns what is statistically im-
portant and how to compute it from the input DAGs through end-
to-end training. In other words, the embeddings can be thought of
as feature vectors that the graph neural network learns to compute

Learning Scheduling Algorithms for Data Processing Clusters SIGCOMM ’19, August 19-23, 2019, Beijing, China
Job DAG 1
Job DAG n Step 1
Step 2
Step 1
Step 2
(a) Per-node embedding.
Job DAG n
Job DAG 1
DAG n
summary
Global
summary
DAG 1
summary
(b) Per-job and global embeddings.
Figure 5:
A graph neural network transforms the raw information on each
DAG node into a vector representation. This example shows two steps of local
message passing and two levels of summarizations.
without manual feature engineering. Decima’s graph neural network
is scalable because it reuses a common set of operations as building
blocks to compute the above embeddings. These building blocks are
themselves implemented as small neural networks that operate on
relatively low-dimensional input vectors.
Per-node embeddings.
Given the vectors
x
i
v
of stage attributes cor-
responding to the nodes in DAG
G
i
, Decima builds a per-node em-
bedding
(G
i
, x
i
v
) 7−→ e
i
v
. The result
e
i
v
is a vector (e.g., in
R
16
) that
captures information from all nodes reachable from
v
(i.e.,
v
’s child
nodes, their children, etc.). To compute these vectors, Decima prop-
agates information from children to parent nodes in a sequence of
message passing steps,startingfromthe leavesof theDAG (Figure5a).
In each message passing step, a node
v
whose children have aggre-
gated messages from all of their children (shaded nodes in Figure 5a’s
examples) computes its own embedding as:
e
i
v
=д
Õ
u ∈ξ (v)
f (e
i
u
)
+x
i
v
, (1)
where
f (·)
and
д(·)
are non-linear transformations over vector inputs,
implemented as (small) neural networks, and
ξ (v)
denotes the set
of
v
’s children. The first term is a general, non-linear aggregation
operation that summarizes the embeddings of
v
’s children; adding
this summary term to
v
’s feature vector (
x
v
) yields the embedding for
v
. Decima reuses the same non-linear transformations
f (·)
and
д(·)
at all nodes, and in all message passing steps.
Most existing graph neural network architectures [
23
,
24
,
46
] use
aggregation operations of the form
e
v
=
Í
u ∈ξ (v)
f (e
u
)
to compute
node embeddings. However, we found that adding a second non-linear
transformation
д(·)
in Eq.
(1)
is critical for learning strong scheduling
policies. The reason is that without
д(·)
, the graph neural network
cannot compute certain useful features for scheduling. For example,
it cannot compute the critical path [
44
] of a DAG, which requires a
max operation across the children of a node during message passing.
5
Combining two non-linear transforms
f (·)
and
д(·)
enables Decima
to express a wide variety of aggregation functions. For example, if
f
and
д
are identity transformations, the aggregation sums the child
node embeddings; if
f ∼ log(·/n)
,
д ∼ exp(n × ·)
, and
n → ∞
, the
aggregation computes the max of the child node embeddings. We
show an empirical study of this embedding in Appendix E.
5
The critical path from node
v
can be computed as:
cp(v )= max
u∈ξ (v)
cp(u )+work(v)
,
where work(·) is the total work on node v .
Per-job and global embeddings.
The graph neural network also
computes a summary of all node embeddings for each DAG
G
i
,
{(x
i
v
, e
i
v
),v ∈ G
i
} 7−→ y
i
; and a global summary across all DAGs,
{y
1
, y
2
, . .. } 7−→ z
. To compute these embeddings, Decima adds a
summary node to each DAG, which has all the nodes in the DAG as
children (the squares in Figure 5b). These DAG-level summary nodes
are in turn children of a single global summary node (the triangle
in Figure 5b). The embeddings for these summary nodes are also
computed using Eq.
(1)
. Each level of summarization has its own
non-linear transformations
f
and
д
; in other words, the graph neural
network uses six non-linear transformations in total, two for each
level of summarization.
5.2 Encoding scheduling decisions as actions
The key challenge for encoding scheduling decisions lies in the learn-
ing and computational complexities of dealing with large action
spaces. As a naive approach, consider a solution, that given the embed-
dings from §5.1, returns the assignment for all executors to job stages
in one shot. This approach has to choose actions from an exponentially
large set of combinations. On the other extreme, consider a solution
that invokes the scheduling agent to pick one stage every time an
executor becomes available. This approach has a much smaller action
space (O(# stages)), but it requires long sequences of actions to sched-
ule a given set of jobs. In RL, both large action spaces and long action
sequences increase sample complexity and slow down training [
7
,
72
].
Decima balances the size of the action space and the number of
actions required by decomposing scheduling decisions into a series
of two-dimensional actions, which output (i) a stage designated to be
scheduled next, and (ii) an upper limit on the number of executors to
use for that stage’s job.
Scheduling events.
Decima invokes the scheduling agent when the
set of runnable stages — i.e., stages whose parents have completed
and which have at least one waiting task — in any job DAG changes.
Such scheduling events happen when (i) a stage runs out of tasks (i.e.,
needs no more executors), (ii) a stage completes, unlocking the tasks
of one ormore of its child stages,or (iii) a newjob arrivestothe system.
At each scheduling event, the agent schedules a group of free ex-
ecutors in one or more actions. Specifically, it passes the embedding
vectors from §5.1 as input to the policy network, which outputs a two-
dimensional action
⟨v,l
i
⟩
, consisting of a stage
v
and the parallelism
limit
l
i
for
v
’s job
i
. If job
i
currently has fewer than
l
i
executors,
Decima assigns executors to
v
up to the limit. If there are still free
executors after the scheduling action, Decima invokes the agent again
to select another stage and parallelism limit. This process repeats until
all the executors have been assigned, or there are no more runnable
stages. Decima ensures that this process completes in a finite number
of steps by enforcing that the parallelism limit
l
i
is greater than the
number of executors currently allocated to job
i
, so that at least one
new executor is scheduled with each action.
Stage selection.
Figure 6 visualizes Decima’s policy network. For
a scheduling event at time
t
, during which the state is
s
t
, the policy
network selects a stage to schedule as follows. For a node
v
in job
i
, it
computes a score
q
i
v
≜ q(e
i
v
,y
i
,z)
, where
q(·)
is a score function that
maps the embedding vectors (output from the graph neural network
in §5.1) to a scalar value. Similar to the embedding step, the score
function is also a non-linear transformation implemented as a neural

SIGCOMM ’19, August 19-23, 2019, Beijing, China H. Mao et al.
Job DAG 1
Job DAG n
Message&
Passing
Message&
Passing
DAG&
Summary
DAG&
Summary
Global&
Summary
Softmax
Graph Neural Network (§5.1)
Stage selection (§5.2)
Parallelism
limit on job
(§5.2)
Softmax
Softmax
Figure 6:
For each node
v
in job
i
, the policy network uses per-node
embedding
e
i
v
, per-job embedding
y
i
and global embedding
z
to compute
(i) the score
q
i
v
for sampling a node to schedule and (ii) the score
w
i
l
for
sampling a parallelism limit for the node’s job.
network. The score
q
i
v
represents the priority of scheduling node
v
.
Decima then uses a softmax operation [
17
] to compute the probability
of selecting nodev based on the priority scores:
P(node=v) =
exp(q
i
v
)
Í
u ∈A
t
exp(q
j(u)
u
)
, (2)
where
j(u)
is the job of node
u
, and
A
t
is the set of nodes that can
be scheduled at time
t
. Notice that
A
t
is known to the RL agent at
each step, since the input DAGs tell exactly which stages are runnable.
Here,
A
t
restricts which outputs are considered by the softmax op-
eration. The whole operation is end-to-end differentiable.
Parallelism limit selection.
Many existing schedulers set a static
degree of parallelism for each job: e.g., Spark by default takes the
number of executors as a command-line argument on job submission.
Decima adapts a job’s parallelism each time it makes a scheduling
decision for that job, and varies the parallelism as different stages in
the job become runnable or finish execution.
For each job
i
, Decima’s policy network also computes a score
w
i
l
≜ w(y
i
,z,l)
for assigning parallelism limit
l
to job
i
, using another
score function
w(·)
. Similar to stage selection, Decima applies a soft-
max operation on these scores to compute the probability of selecting
a parallelism limit (Figure 6).
Importantly, Decima uses the same score function
w(·)
for all jobs
and all parallelism limit values. This is possible because the score
function takes the parallelism
l
as one of its inputs. Without using
l
as
an input, we cannot distinguish between different parallelism limits,
and would have to use separate functions for each limit. Since the
number of possible limits can be as large as the number of executors,
reusing the same score function significantly reduces the number of
parameters in the policy network and speeds up training (Figure 15a).
Decima’s action specifies job-level parallelism (e.g., ten total ex-
ecutors for the entire job), as opposed fine-grained stage-level paral-
lelism. This design choice trades off granularity of control for a model
that is easier to train. In particular, restricting Decima to job-level
parallelism control reduces the space of scheduling policies that it
must explore and optimize over during training.
However, Decima still maintains the expressivity to (indirectly)
control stage-level parallelism. On each scheduling event, Decima
picks a stagev, and new parallelism limit l
i
forv’s job i. The system
then schedules executors to
v
until
i
’s parallelism reaches the limit
l
i
.
Through repeated actions with different parallelism limits, Decima
can add desired numbers of executors to specific stages. For example,
suppose job
i
currently has ten executors, four of which are working
on stage
v
. To add two more executors to
v
, Decima, on a scheduling
event, picks stage
v
with parallelism limit of 12. Our experiments
show that Decima achieves the same performance with job-level
parallelism as with fine-grained, stage-level parallelism choice, at
substantially accelerated training (Figure 15a).
5.3 Training
The primary challenge for training Decima is how to train with contin-
uous stochastic job arrivals. To explain the challenge, we first describe
the RL algorithms used for training.
RL training proceeds in episodes. Each episode consists of mul-
tiple scheduling events, and each scheduling event includes one or
more actions. Let
T
be the total number of actions in an episode (
T
can
varyacross differentepisodes), and
t
k
be the wall clock time of the
k
th
action. To guide the RL algorithm, Decima gives the agent a reward
r
k
after each action based on its high-level scheduling objective. For
example, if the objective is to minimize the average JCT, Decima
penalizes the agent r
k
= −(t
k
−t
k−1
)J
k
after the k
th
action, where J
k
is the number of jobs in the system during the interval [t
k−1
,t
k
). The
goal of the RL algorithm is to minimize the expected time-average of
the penalties:
E
h
1/t
T
Í
T
k=1
(t
k
−t
k−1
)J
k
i
. This objective minimizes
the average number of jobs in the system, and hence, by Little’s
law [21, §5], it effectively minimizing the average JCT.
Decima uses a policy gradient algorithm for training. The main
idea in policy gradient methods is to learn by performing gradient
descent on the neural network parameters using the rewards observed
during training. Notice that all of Decima’s operations, from the graph
neural network (§5.1) to the policy network (§5.2), are differentiable.
For conciseness, we denote all of the parameters in these operations
jointly as
θ
, and the scheduling policy as
π
θ
(s
t
,a
t
)
— defined as the
probability of taking action a
t
in state s
t
.
Consider an episode of length
T
, where the agent collects (state,
action, reward) observations, i.e.,
(s
k
, a
k
, r
k
)
, at each step
k
. The
agent updates the parameters
θ
of its policy
π
θ
(s
t
,a
t
)
using the RE-
INFORCE policy gradient algorithm [79]:
θ ←θ + α
T
Õ
k=1
∇
θ
logπ
θ
(s
k
,a
k
)
T
Õ
k
′
=k
r
k
′
−b
k
!
. (3)
Here,
α
is the learning rate and
b
k
is a baseline used to reduce the
variance of the policy gradient [
78
]. An example of a baseline is a
“time-based” baseline [
37
,
53
], which sets
b
k
to the cumulative reward
from step
k
onwards, averaged over all training episodes. Intuitively,
(
Í
k
′
r
k
′
−b
k
)
estimates how much better (or worse) the total reward is
(from step
k
onwards) in a particular episode compared to the average
case; and
∇
θ
logπ
θ
(s
k
,a
k
)
provides a direction in the parameter space
to increase the probability of choosing action
a
k
at state
s
k
. As a
result, the net effect of this equation is to increase the probability of
choosing an action that leads to a better-than-average reward.
6
6
The update rule in Eq.
(3)
aims to maximize the sum of rewards during an episode. To
maximize the time-average of the rewards, Decima uses a slightly modified form of this
equation. See Appendix B for details.

Learning Scheduling Algorithms for Data Processing Clusters SIGCOMM ’19, August 19-23, 2019, Beijing, China
0
50
100
150
Job size
Job sequence 1
Job sequence 2
Taking the same action
at the same state
at time t
0 100 200 300 400 500 600 700
Time (seconds)
0
5
10
Penalty
(neg. reward)
But the reward feedbacks
are vastly different
Figure 7:
Illustrative example of how different job arrival sequences can lead
to vastly different rewards. After time
t
, we sample two job arrival sequences,
from a Poisson arrival process (10 seconds mean inter-arrival time) with
randomly-sampled TPC-H queries.
Challenge #1: Training with continuous job arrivals.
To learn a
robust scheduling policy, the agent has to experience “streaming”
scenarios, where jobs arrive continuously over time, during training.
Training with “batch” scenarios, where all jobs arrive at the beginning
of an episode, leads to poor policies in streaming settings (e.g., see
Figure 14). However, training with a continuous stream of job arrivals
is non-trivial. In particular, the agent’s initial policy is very poor (e.g.,
as the initial parameters are random). Therefore, the agent cannot
schedule jobs as quickly as they arrive in early training episodes,
and a large queue of jobs builds up in almost every episode. Letting
the agent explore beyond a few steps in these early episodes wastes
training time, because the overloaded cluster scenarios it encounters
will not occur with a reasonable policy.
To avoid this waste, we terminate initial episodes early so that the
agent can reset and quickly try again from an idle state. We gradually
increase the episode length throughout the training process. Thus,
initially, the agent learns to schedule short sequences of jobs. As its
scheduling policy improves, we increase the episode length, making
the problem more challenging. The concept of gradually increasing
job sequence length— and therefore, problem complexity — during
training realizes curriculum learning [14] for cluster scheduling.
One subtlety about this method is that the termination cannot be de-
terministic. Otherwise, the agent can learn to predict when an episode
terminates, and defer scheduling certain large jobs until the termina-
tion time. This turns out to be the optimal strategy over a fixed time
horizon: since the agent is not penalized for the remaining jobs at
termination, it is better to strictly schedule short jobs even if it means
starving some large jobs. We found that this behavior leads to indefi-
nite starvation of some jobs at runtime (where jobs arrive indefinitely).
To prevent this behavior, we use a memoryless termination process.
Specifically, we terminate each training episode after a time
τ
, drawn
randomly from an exponential distribution. As explained above, the
mean episode length increases during training up to a large value (e.g.,
a few hundreds of job arrivals on average).
Challenge #2: Variance caused by stochastic job arrivals.
Next,
for a policy to generalize well in a streaming setting, the training
episodes must include many different job arrival patterns. This creates
a new challenge: different job arrival patterns have a large impact
on performance, resulting in vastly different rewards. Consider, for
example, a scheduling action at the time
t
shown in Figure 7. If the
arrival sequence following this action consists of a burst of large jobs
(e.g., job sequence 1), the job queue will grow large, and the agent will
incur large penalties. On the other hand, a light stream of jobs (e.g.,
job sequence 2) will lead to short queues and small penalties. The
problem is that this difference in reward has nothing to do with the
action at time
t
— it is caused by the randomness in the job arrival pro-
cess. Since the RL algorithm uses the reward to assess the goodness
of the action, such variance adds noise and impedes effective training.
To resolve this problem, we build upon a recently-proposed vari-
ance reduction technique for “input-driven” environments [
55
], where
an exogenous, stochastic input process (e.g., Decima’s job arrival pro-
cess) affects the dynamics of the system. The main idea is to fix
the same job arrival sequence in multiple training episodes, and to
compute separate baselines specifically for each arrival sequence. In
particular, instead of computing the baselineb
k
in Eq. (3) by averag-
ing over episodes with different arrival sequences, we average only
over episodes with the same arrival sequence. During training, we
repeat this procedure for a large number of randomly-sampled job
arrival sequences (§7.2 and §7.3 describe howwe generate the specific
datasets for training). This method removes the variance caused by
the job arrival process entirely, enabling the policy gradient algorithm
to assess the goodness of different actions much more accurately (see
Figure 14). For the implementation details of our training and the
hyperparameter settings used, see Appendix C.
6 Implementation
We have implemented Decima as a pluggable scheduling service that
parallel data processing platforms can communicate with over an
RPC interface. In §6.1, we describe the integration of Decima with
Spark. Next, we describe our Python-based training infrastructure
which includes an accurate Spark cluster simulator (§6.2).
6.1 Spark integration
A Spark cluster
7
runs multiple parallel applications, which contain
one or more jobs that together form a DAG of processing stages. The
Spark master manages application execution and monitors the health
of many workers, which each split their resources between multiple
executors. Executors are created for, and remain associated with, a
specific application, which handles its own scheduling of work to
executors. Once an application completes, its executors terminate.
Figure 8 illustrates this architecture.
To integrate Decima in Spark, we made two major changes:
(1)
Each application’s
DAG scheduler
contacts Decima on startup
and whenever a scheduling event occurs. Decima responds with
the next stage to work on and the parallelism limit (§5.2).
(2)
The Spark
master
contacts Decima when a new job arrives to
determine how many executors to launch for it, and aids Decima
by taking executors away from a job once they complete a stage.
State observations.
In Decima, the feature vector
x
i
v
(§5.1) of a node
v
in job DAG
i
consists of: (i) the number of tasks remaining in the
stage, (ii) the average task duration, (iii) the number of executors
currently working on the node, (iv) the number of available executors,
and (v) whether available executors are local to the job. We picked
these features by attempting to include information necessary to cap-
ture the state of the cluster (e.g., the number of executors currently
assigned to each stage), as well as the statistics that may help in
7
We discuss Spark’s “standalone” mode of operation here (http://spark.apache.org/docs/
latest/spark-standalone.html); YARN-based deployments can, in principle, use Decima,
but require modifying both Spark and YARN.

SIGCOMM ’19, August 19-23, 2019, Beijing, China H. Mao et al.
DAG$
Scheduler
Tas k$
Scheduler
App 1
App 2
Spark$
Master
Decima
Agent
New job:
Update job
info
Submit tasks
Job ends:
Move
executors
Figure 8:
Spark standalone cluster architecture, with Decima additions
highlighted.
scheduling decisions (e.g., a stage’s average task duration). These
statistics depend on the information available (e.g., profiles from past
executions of the same job, or runtime metrics) and on the system
used (here, Spark). Decima can easily incorporate additional signals.
Neural network architecture.
The graph neural network’s six trans-
formation functions
f (·)
and
д(·)
(§5.1) (two each for node-level,
job-level, and global embeddings) and the policy network’s two score
functions
q(·)
and
w(·)
(§5.2) are implemented using two-hidden-
layer neural networks, with 32 and 16 hidden units on each layer.
Since these neural networks are reused for all jobs and all parallelism
limits, Decima’s model is lightweight — it consists of 12,736 parame-
ters (50KB) in total. Mapping the cluster state to a scheduling decision
takes less than 15ms (Figure 15b).
6.2 Spark simulator
Decima’s training happens offline using a faithful simulator that has
access to profiling information (e.g., task durations) from a real Spark
cluster (§7.2) and the job run time characteristics from an industrial
trace (§7.3). To faithfully simulate how Decima’s decisions interact
with a cluster, our simulator captures several real-world effects:
(1)
The first “wave” of tasks from a particular stage often runs slower
than subsequent tasks. This is due to Spark’s pipelined task exe-
cution [
63
], JIT compilation [
47
] of task code, and warmup costs
(e.g., making TCP connections to other executors). Decima’s sim-
ulated environment thus picks the actual runtime of first-wave
tasks from a different distribution than later waves.
(2)
Adding an executor to a Spark job involves launching a JVM
process, which takes 2–3 seconds. Executors are tied to a job
for isolation and because Spark assumes them to be long-lived.
Decima’s environment therefore imposes idle time reflecting the
startup delay every time Decima moves an executor across jobs.
(3)
A high degree of parallelism can slow down individual Spark
tasks, as wider shuffles require additional TCP connections and
create more work when mergingdata from manyshards. Decima’s
environment captures these effects by sampling task durations
from distributions collected at different levels of parallelism if
this data is available.
In Appendix D, we validate the fidelity of our simulator by comparing
it with real Spark executions.
7 Evaluation
We evaluated Decima on a real Spark cluster testbed and in simu-
lations with a production workload from Alibaba. Our experiments
address the following questions:
(a) Batched arrivals. (b) Continuous arrivals.
Figure 9:
Decima’s learned scheduling policy achieves 21%–3.1
×
lower
average job completion time than baseline algorithms for batch and continuous
arrivals of TPC-H jobs in a real Spark cluster.
(1)
Howdoes Decimaperform compared tocarefully-tuned heuristics
in a real Spark cluster (§7.2)?
(2)
Can Decima’s learning generalize to a multi-resource setting with
different machine configurations (§7.3)?
(3)
How does each of our key ideas contribute to Decima’s perfor-
mance; how does Decima adapt when scheduling environments
change; and how fast does Decima train and make scheduling
decisions after training?
7.1 Existing baseline algorithms
In our evaluation, we compare Decima’s performance to that of seven
baseline algorithms:
(1)
Spark’s default FIFO scheduling, which runs jobs in the same
order they arrive in and grants as many executors to each job as
the user requested.
(2)
A shortest-job-first critical-path heuristic (SJF-CP), which priori-
tizes jobs based on their total work, and within each job runs tasks
from the next stage on its critical path.
(3)
Simple fair scheduling, which gives each job an equal fair share
of the executors and round-robins over tasks from runnable stages
to drain all branches concurrently.
(4)
Naive weighted fair scheduling, which assigns executors to jobs
proportional to their total work.
(5)
A carefully-tuned weighted fair scheduling that gives each job
T
α
i
/
Í
i
T
α
i
of total executors, where
T
i
is the total work of each
job
i
and
α
is a tuning factor. Notice that
α = 0
reduces to the
simple fair scheme, and
α = 1
to the naive weighted fair one. We
sweep through α ∈ {−2,−1.9,. . .,2} for the optimal factor.
(6)
The standard multi-resource packing algorithm from Tetris [
34
],
which greedily schedules the stage that maximizes the dot product
of the requested resource vector and the available resource vector.
(7)
Graphene
∗
, an adaptation of Graphene [
36
] for Decima’s discrete
executor classes. Graphene
∗
detects and groups “troublesome”
nodes using Graphene’s algorithm [
36
, §4.1], and schedules them
together with optimally tuned parallelism as in (5), achieving the
essence of Graphene’splanning strategy. Weperform a grid search
to optimize for the hyperparameters (details in Appendix F).
7.2 Spark cluster
We use an OpenStack cluster running Spark v2.2, modified as de-
scribed in §6.1, in the Chameleon Cloudtestbed.
8
The cluster consists
8
https://www.chameleoncloud.org

Learning Scheduling Algorithms for Data Processing Clusters SIGCOMM ’19, August 19-23, 2019, Beijing, China
(a)
(b)
(c)
(d)
(e)
Figure 10:
Time-series analysis (a, b) of continuous TPC-H job arrivals to
a Spark cluster shows that Decima achieves most performance gains over
heuristics during busy periods (e.g., runs jobs
2×
faster during hour 8), as
it appropriately prioritizes small jobs (c) with more executors (d), while
preventing work inflation (e).
of 25 worker VMs, each running two executors on an
m1.xlarge
in-
stance (8 CPUs, 16 GB RAM) and a master VM on an
m1.xxxlarge
in-
stance (16 CPUs, 32 GB RAM). Our experiments consider (i) batched
arrivals, in which multiple jobs start at the same time and run until
completion, and (ii) continuous arrivals, in which jobs arrive with
stochastic interarrival distributions or follow a trace.
Batched arrivals.
We randomly sample jobs from six different input
sizes (2, 5, 10, 20, 50, and 100 GB) and all 22 TPC-H [
73
] queries,
producing a heavy-tailed distribution:
23%
of the jobs contain
82%
of
the total work. A combination of 20 random jobs (unseen in training)
arrives as a batch, and we measure their average JCT.
Figure 9a shows a cumulative distribution of the average JCT over
100 experiments. There are three key observations from the results.
First, SJF-CP and fair scheduling, albeit simple, outperform the FIFO
policy by 1.6
×
and 2.5
×
on average. Importantly, the fair scheduling
policies outperform SJF-CP since they work on multiple jobs, while
SJF-CP focuses all executors exclusively on the shortest job.
Second, perhaps surprisingly, unweighted fair scheduling outper-
forms fair scheduling weighted by job size (“naive weighted fair”).
This is because weighted fair scheduling grants small jobs fewer
executors than their fair share, slowing them down and increasing
average JCT. Our tuned weighted fair heuristic (“opt. weighted fair”)
counters this effect by calibrating the weights for each job on each ex-
periment (§7.1). The optimal
α
is usually around
−1
, i.e., the heuristic
sets the number of executors inversely proportional to job size. This
policy effectively focuses on small jobs early on, and later shifts to
running large jobs in parallel; it outperforms fair scheduling by 11%.
Finally, Decima outperforms all baseline algorithms and improves
the average JCT by
21%
over the closest heuristic (“opt. weighted
fair”). This is because Decima prioritizes jobs better, assigns efficient
executor shares to different jobs, and leverages the job DAG structure
(§7.4 breaks down the benefit of each of these factors). Decima au-
tonomously learns this policy through end-to-end RL training, while
the best-performing baseline algorithms required careful tuning.
Continuous arrivals.
We sample 1,000 TPC-H jobs of six different
sizesuniformly at random,and model their arrivalas a Poissonprocess
with an average interarrival time of 45 seconds. The resulting cluster
load is about
85%
. At this cluster load, jobs arrive faster than most
heuristic-based scheduling policies can complete them. Figure 9b
(a) Industrial trace replay. (b) TPC-H workload.
Figure 11:
With multi-dimensional resources, Decima’s scheduling policy
outperforms Graphene
∗
by 32% to 43% in average JCT.
(a)
Job duration grouped by to-
tal work, Decima normalized to
Graphene
∗
.
0.25 0.5 0.75 1
Executor memory
0.0
0.5
1.0
1.5
Normalized
executor count
(b)
Number of executors that Decima
uses for “small” jobs, normalized to
Graphene
∗
.
Figure 12:
Decima outperforms Graphene
∗
with multi-dimensional resources
by (a) completing small jobs faster and (b) use “oversized” executors for small
jobs (smallest 20% in total work).
shows that Decima outperforms the only baseline algorithm that can
keep up (“opt. weighted fair”); Decima’s average JCT is
29%
lower.
In particular, Decima shines during busy, high-load periods, where
scheduling decisions have a much larger impact than when cluster
resources are abundant. Figure 10a shows that Decima maintains a
lowerconcurrent job count than the tuned heuristic particularly during
the busy period in hours 7–9, where Decima completes jobs about
2×
faster (Figure 10b). Performance under high load is important
for batch processing clusters, which often have long job queues [
66
],
and periods of high load are when good scheduling decisions have
the most impact (e.g., reducing the overprovisioning required for
workload peaks).
Decima’s performance gain comes from finishing small jobs faster,
as the concentration of red points in the lower-left corner of Fig-
ure 10c shows. Decima achieves this by assigning more executors
to the small jobs (Figure 10d). The right number of executors for
each job is workload-dependent: indiscriminately giving small jobs
more executors would use cluster resources inefficiently (§2.2). For
example, SJF-CP’s strictly gives all available executors to the small-
est job, but this inefficient use of executors inflates total work, and
SJF-CP therefore accumulates a growing backlog of jobs. Decima’s
executor assignment, by contrast, results in similar total work as with
the hand-tuned heuristic. Figure 10e shows this: jobs below the diago-
nal have smaller total work with Decima than with the heuristic, and
ones above have larger total work in Decima. Most small jobs are on
the diagonal, indicating that Decima only increases the parallelism
limit when extra executors are still efficient. Consequently, Decima
successfully balances between giving small jobs extra resources to
finish them sooner and using the resources efficiently.
SIGCOMM ’19, August 19-23, 2019, Beijing, China H. Mao et al.
7.3 Multi-dimensional resource packing
The standalone Spark scheduler used in our previous experiments
only provides jobs with access to predefined executor slots. More
advanced cluster schedulers, such as YARN [
75
] or Mesos [
41
], al-
low jobs to specify their tasks’ resource requirements and create
appropriately-sized executors. Packing tasks with multi-dimensional
resource needs (e.g.,
⟨
CPU, memory
⟩
) onto fixed-capacity servers
adds further complexity to the scheduling problem [
34
,
36
]. We use a
production trace from Alibaba to investigate if Decima can learn good
multi-dimensional scheduling policies with the same core approach.
Industrial trace.
The trace contains about 20,000 jobs from a pro-
duction cluster. Many jobs have complex DAGs: 59% have four or
more stages, and some have hundreds. We run the experiments using
our simulator (§6.2) with up to 30,000 executors. This parameter
is set according to the maximum number of concurrent tasks in the
trace. We use the first half of the trace for training and then compare
Decima’s performance with other schemes on the remaining portion.
Multi-resource environment.
We modify Decima’s environment to
provide several discrete executor classes with different memory sizes.
Tasks now require a minimum amount of CPU and memory, i.e., a
task must fit into the executor that runs it. Tasks can run in executors
larger than or equal to their resource request. Decima now chooses
a DAG stage to schedule, a parallelism level, and an executor class to
use. Our experiments use four executor types, each with
1
CPU core
and
(0. 25,0.5,0. 75,1)
unit of normalized memory; each executor class
makes up 25% of total cluster executors.
Results.
We run simulated multi-resource experiments on continuous
job arrivals according to the trace. Figure 11a shows the results for
Decima and three other algorithms: the optimally tuned weighted-fair
heuristic, Tetris, and Graphene
∗
. Decima achieves a
32%
lower aver-
age JCT than the best competing algorithm (Graphene
∗
), suggesting
that it learns a good policy in the multi-resource environment.
Decima’s policy is qualitatively different to Graphene
∗
’s. Fig-
ure 12a breaks Decima’s improvement over Graphene
∗
down by jobs’
total work. Decima completes jobs faster than Graphene
∗
for all job
sizes, but its gain is particularly large for small jobs. The reason is that
Decima learns to use “oversized” executors when they can help finish
nearly-completed small jobs when insufficiently many right-sized
executors are available. Figure 12b illustrates this: Decima uses
39%
more executors of the largest class on the jobs with smallest
20%
total
work (full profiles in Appendix G). In other words, Decima trades off
memory fragmentation against clearing the job queue more quickly.
This trade-off makes sense because small jobs (i) contribute more
to the average JCT objective, and (ii) only fragment resources for
a short time. By contrast, Tetris greedily packs tasks into the best-
fitting executor class and achieves the lowest memory fragmentation.
Decima’s fragmentation is within
4%
–
13%
of Tetris’s, but Decima’s
average JCT is
52%
lower, as it learns to balance the trade-off well.
This requires respecting workload-dependent factors, such as the
DAG structure, the threshold for what is a “small” job, and others.
Heuristic approaches like Graphene
∗
attempt to balance those factors
via additivescore functions and extensive tuning, while Decima learns
them without such inputs.
We also repeat this experiment with the TPC-H workload, using
200executorsand sampling each TPC-H DAG node’s memoryrequest
from
(0,1]
. Figure 11b shows that Decima outperforms the competing
algorithms by even larger margins (e.g.,
43%
over Graphene
∗
). This
is because the industrial trace lacks work inflation measurements for
different levels of parallelism, which we provide for TPC-H. Decima
learns to use this information to further calibrate executor assignment.
7.4 Decima deep dive
Finally, we demonstrate the wide range of scheduling policies Dec-
ima can learn, and break down the impact of our key ideas and tech-
niques on Decima’s performance. In appendices, we further evaluate
Decima’s optimality via an exhaustive search of job orderings (Ap-
pendix H), the robustness of its learned policies to changing en-
vironments (Appendix I), and Decima’s sensitivity to incomplete
information (Appendix J).
Learned policies.
Decima outperforms other algorithms because it
can learn different policies depending on the high-level objective, the
workload, and environmental conditions. When Decima optimizes for
average JCT (Figure 13a), it learns to share executors for small jobs to
finish them quickly and avoids inefficiently using too many executors
on large jobs (§7.2). Decima also keeps the executors working on
tasks from the same job to avoid the overhead of moving executors
(§6.1). However, if moving executors between jobs is free — as is
effectively the case for long tasks, or for systems without JVM spawn
overhead — Decima learns a policy that eagerly moves executors
among jobs (cf. the frequent color changes in Figure 13b). Finally,
given a different objective of minimizing the overall makespan for a
batch of jobs, Decima learns yet another different policy (Figure 13c).
Since only the final job’s completion time matters for a makespan
objective, Decima no longer works to finish jobs early. Instead, many
jobs complete together at the end of the batched workload, which
gives the scheduler more choices of jobs throughout the execution,
increasing cluster utilization.
Impact of learning architecture.
We validate that Decima uses all
raw information provided in the state and requires all its key design
components by selectively omitting components. We run 1,000 con-
tinuous TPC-H job arrivals on a simulated cluster at different loads,
and train five different variants of Decima on each load.
Figure 14 shows that removing any one component from Decima
results in worse average JCTs than the tuned weighted-fair heuristic
at a high cluster load. There are four takeaways from this result. First,
parallelism control has the greatest impact on Decima’s performance.
Without parallelism control, Decima assigns all available executors
to a single stage at every scheduling event. Even at a moderate cluster
load (e.g., 55%), this leads to an unstable policy that cannot keep up
with the arrival rate of incoming jobs. Second, omitting the graph em-
bedding (i.e., directly taking raw features on each node as input to the
score functions in §5.2) makes Decima unable to estimate remaining
work in a job and to account for other jobs in the cluster. Consequently,
Decima has no notion of small jobs or cluster load, and its learned
policy quickly becomes unstable as the load increases. Third, using
unfixed job sequences across training episodes increases the variance
in the rewardsignal (§5.3). Asthe load increases,job arrivalsequences
become more varied, which increases variance in the reward. At clus-
ter load larger than
75%
, reducing this variance via synchronized
termination improves average JCT by
2×
when training Decima, illus-
trating that variance reduction is key to learning high-quality policies

Learning Scheduling Algorithms for Data Processing Clusters SIGCOMM ’19, August 19-23, 2019, Beijing, China
Executors
Avg. JCT 67.3 sec, makespan 119. 6 sec
Time (seconds)
0 12060 9030
(a) Average JCT objective.
Executors
Avg. JCT 61.4 sec, makespan 114.3 sec
Time (seconds)
0 12060 9030
(b) Avg. JCT, with zero-cost executor motion.
Executors
Time (seconds)
0 12060 9030
Avg. JCT 74.5 sec, makespan 102.1 sec
(c) Minimal makespan objective.
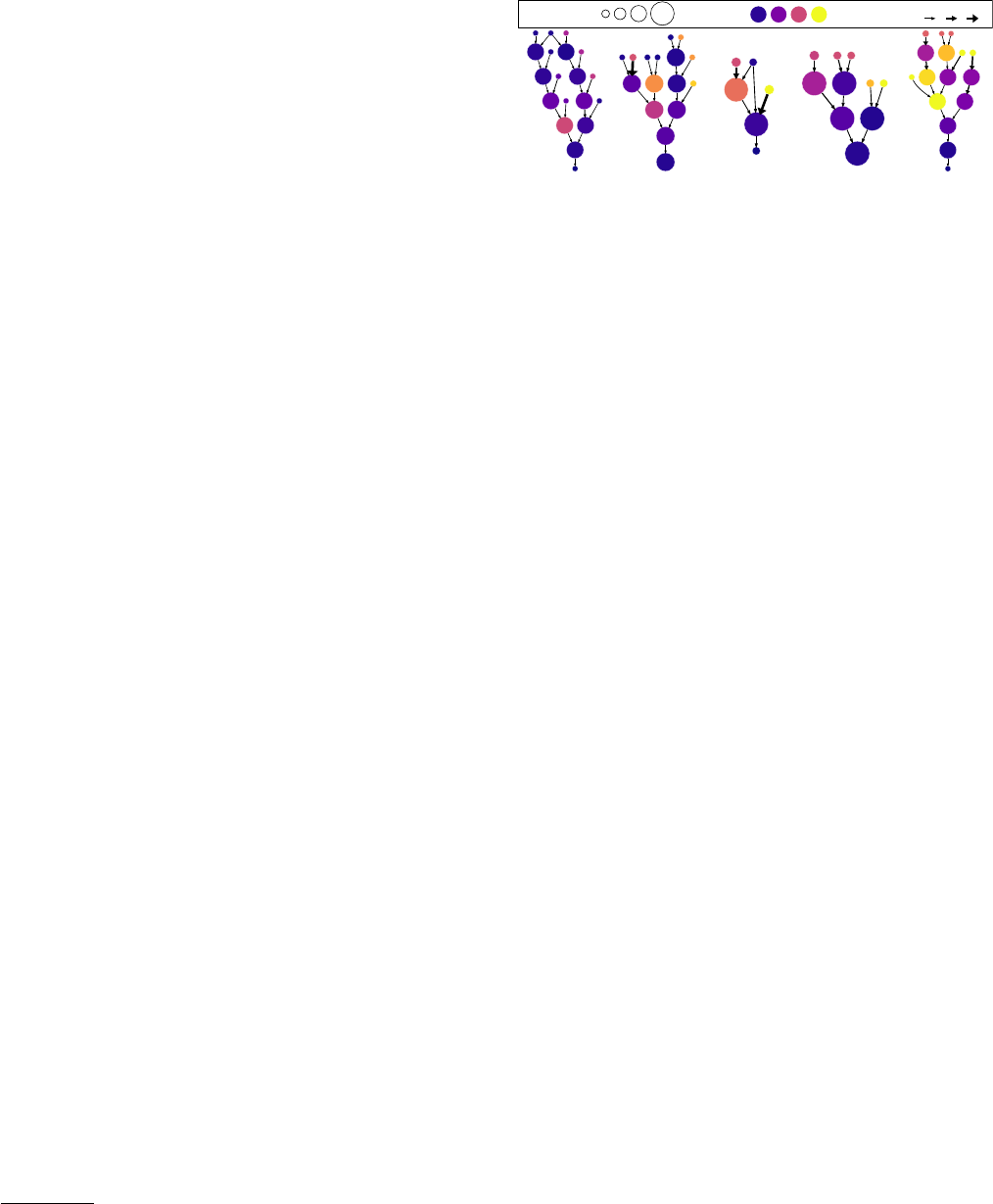
Figure 13:
Decima learns qualitatively different policies depending on the environment (e.g., costly (a) vs. free executor migration (b)) and the objective (e.g.,
average JCT (a) vs. makespan (c)). Vertical red lines indicate job completions, colors indicate tasks in different jobs, and dark purple is idle time.
Figure 14:
Breakdown of each key idea’s contribution to Decima with
continuous job arrivals. Omitting any concept increases Decima’s average
JCT above that of the weighted fair policy.
Setup (IAT: interarrival time) Average JCT [sec]
Opt. weighted fair (best heuristic) 91.2±23.5
Decima, trained on test workload (IAT: 45 sec) 65.4±28.7
Decima, trained on anti-skewed workload (IAT: 75 sec) 104.8±37.6
Decima, trained on mixed workloads 82.3±31.2
Decima, trained on mixed workloads with interarrival time hints 76.6±33.4
Table 2:
Decima generalizes to changing workloads. For an unseen workload,
Decima outperforms the best heuristic by
10%
when trained with a mix of
workloads; and by 16% if it knows the interarrival time from an input feature.
inlong-horizon scheduling problems.Fourth,trainingonly on batched
job arrivals cannot generalize to continuous job arrivals. When trained
on batched arrivals, Decima learns to systematically defer large jobs,
as this results in the lowest sum of JCTs (lowest sum of penalties).
With continuous job arrivals, this policy starves large jobs indefinitely
as the cluster load increases and jobs arrive more frequently. Conse-
quently, Decima underperforms the tuned weighted-fair heuristic at
loads above 65% when trained on batched arrivals.
Generalizing to different workloads.
We test Decima’s ability to
generalize by changing the training workload in the TPC-H experi-
ment (§7.2). To simulate shifts in cluster workload, we train models
for different job interarrival times between 42 and 75 seconds, and
test them using a workload with a 45 second interarrival time. As
Decima learns workload-specific policies, we expect its effectiveness
to depend on whether broad test workload characteristics, such as in-
terarrival time and job size distributions, match the training workload.
Table 2 shows the resulting average JCT. Decima performs well
when trained on a workload similar to the test workload. Unsur-
prisingly, when Decima trains with an “anti-skewed” workload (75
seconds interarrival time), it generalizes poorly and underperforms
the optimized weighted fair policy. This makes sense because Decima
incorporates the learned interarrival time distribution in its policy.
When training with a mixed set of workloads that cover the whole
interarrival time range, Decima can learn a more general policy. This
(a) Learning curve. (b) Scheduling delay.
Figure 15:
Different encodings of jobs parallelism (§5.2) affect Decima’s
training time. Decima makes low-latency scheduling decisions: on average,
the latency is about 50
×
smaller than the interval between scheduling events.
policy fits less strongly to a specific interarrival time distribution and
therefore becomes more robust to workload changes. If Decima can
observe the interarrival time as a feature in its state (§6.1), it gener-
alizes better still and learns an adaptive policy that achieves a 16%
lower average JCT than the best heuristic. These results highlight that
a diverse training workload set helps make Decima’s learned policies
robust to workload shifts; we discuss possible online learning in §8.
Training and inference performance.
Figure 15a shows Decima’s
learning curve (in blue) on continuous TPC-H job arrivals (§7.2),
testing snapshots of the model every 100 iterations on (unseen) job
arrival sequences. Each training iteration takes about 5 seconds. Dec-
ima’s design (§5.3) is crucial for training efficiency: omitting the
parallelism limit values in the input (yellow curve) forces Decima to
use separate score functions for different limits, significantly increas-
ing the number of parameters to optimize over; putting fine-grained
parallelism control on nodes (green curve) slows down training as it
increases the space of algorithms Decima must explore.
Figure 15b shows cumulative distributions of the time Decima
takes to decide on a scheduling action (in red) and the time interval
between scheduling events (in blue) in our Spark testbed (§7.2). The
average scheduling delay for Decima is less than 15ms, while the
interval between scheduling events is typically in the scale of seconds.
In less than
5%
of the cases, the scheduling interval is shorter than the
scheduling delay (e.g., when the cluster requests for multiple schedul-
ing actions in a single scheduling event). Thus Decima’s scheduling
delay imposes no measurable overhead on task runtimes.
8 Discussion
In this section, we discuss future research directions and other poten-
tial applications for Decima’s techniques.
SIGCOMM ’19, August 19-23, 2019, Beijing, China H. Mao et al.
Robustness and generalization.
Our experiments in §7.4 showed
that Decima can learn generalizable scheduling policies that work
well on anunseen workload. However, more drasticworkload changes
than interarrival time shifts could occur. To increase robustness of a
scheduling policy against such changes, it may be helpful to train the
agent on worst-case situations or adversarial workloads, drawing on
the emerging literature on robust adversarial RL [
64
]. Another direc-
tion is to adjust the scheduling policy online as the workload changes.
The key challenge with an online approach is to reduce the large sam-
ple complexity of model-free RL when the workload changes quickly.
One viable approach might be to use meta learning [
22
,
27
,
29
], which
allows training a “meta” scheduling agent that is designed to adapt
to a specific workload with only a few observations.
Other learning objectives.
In our experiments, we evaluated Dec-
ima on metrics related to job duration (e.g., average JCT, makespan).
Shaping the reward signal differently can steer Decima to meet other
objectives, too. For example, imposing a hard penalty whenever the
deadline of a job is missed would guide Decima to a deadline-aware
policy. Alternatively, basing the reward on e.g., the 90th percentile of
empirical job duration samples, Decima can optimize for a tight tail of
the JCT distribution. Addressing objectives formulated as constrained
optimization (e.g., to minimize average JCT, but strictly guarantee
fairness) using RL is an interesting further direction [2, 30].
Preemptive scheduling.
Decima currently never preempts running
tasks and can only remove executors from a job after a stage com-
pletes. This design choice keeps the MDP tractable for RL and results
in effective learning and strong scheduling policies. However, future
work might investigate more fine-grained and reactive preemption
in an RL-driven scheduler such as Decima. Directly introducing pre-
emption would lead to a much larger action space (e.g., specifying
arbitrary set of executors to preempt) and might require a much higher
decision-making frequency. To make the RL problem tractable, one
potential research direction is to leverage multi-agent RL [
38
,
50
,
62
].
For example, a Decima-like scheduling agent might controls which
stage to run next and how many executors to assign, and, concurrently,
another agent might decide where to preempt executors.
Potential networking and system applications.
Some techniques
we developed for Decima are broadly applicable to other networking
and computer systems problems. For example, the scalable represen-
tation of input DAGs (§5.1) has applications in problems over graphs,
such as database query optimization [
56
] and hardware device place-
ment [
3
]. Our variance reduction technique (§5.3) generally applies
to systems with stochastic, unpredictable inputs [54, 55].
9 Related Work
There is little prior work on applying machine learning techniques
to cluster scheduling. DeepRM [
53
], which uses RL to train a neu-
ral network for multi-dimensional resource packing, is closest to
Decima in aim and approach. However, DeepRM only deals with
a basic setting in which each job is a single task and was evaluated
in simple, simulated environments. DeepRM’s learning model also
lacks support for DAG-structured jobs, and its training procedure
cannot handle realistic cluster workloads with continuous job arrivals.
In other applications, Mirhoseini et al.’s work on learning device
placement in TensorFlow (TF) computations [
60
] also uses RL, but
relies on recurrent neural networks to scan through all nodes for state
embedding, rather than a graph neural network. Their approach use re-
current neural networks to scan through all nodes for state embedding
instead of using a scalable graph neural network. The objective there
is to schedule a single TF job well, and the model cannot generalize
to unseen job combinations [59].
Prior work in machine learning and algorithm design has combined
RL and graph neural networks to optimize complex combinatorial
problems, such as vertex set cover and the traveling salesman prob-
lem [
23
,
49
]. The design of Decima’s scalable state representation is
inspired by this line of work, but we found that off-the-shelf graph
neural networks perform poorly for our problem. To train strong
scheduling agents, we had to change the graph neural network ar-
chitecture to enable Decima to compute, amongst other metrics, the
critical path of a DAG (§5.1).
For resource management systems more broadly, Paragon [
25
] and
Quasar [
26
] use collaborative filtering to match workloads to different
machine types and avoid interference; their goal is complementary to
Decima’s. Tetrisched [
74
], like Decima, plans ahead in time, but uses
a constraint solver to optimize job placement and requires the user
to supply explicit constraints with their jobs. Firmament [
33
] also
uses a constraint solver and achieves high-quality placements, but
requires an administrator to configure an intricate scheduling policy.
Graphene [
36
] uses heuristics to schedule job DAGs, but cannot set
appropriate parallelism levels. Some systems “auto-scale” parallelism
levels to meet job deadlines [
28
] or opportunistically accelerate jobs
using spare resources [
68
, §5]. Carbyne [
35
] allows jobs to “altruisti-
cally” give up some of their short-term fair share of cluster resources
in order to improve JCT across jobs while guarantee long-term fair-
ness. Decima learns policies similar to Carbyne’s, balancing resource
shares and packing for low average JCT, but the current design of
Decima does not have fairness an objective.
General-purpose cluster managers like Borg [
77
], Mesos [
41
], or
YARN [
75
] support many different applications, making workload-
specificscheduling policies are difficult toapply at this level. However,
Decima could run as a framework atop Mesos or Omega [68].
10 Conclusion
Decima demonstrates that automatically learning complex cluster
scheduling policies using reinforcement learning is feasible, and that
the learned policies are flexible and efficient. Decima’s learning inno-
vations, such as its graph embedding technique and the training frame-
work for streaming, may be applicable to other systems processing
DAGs(e.g., query optimizers). We will open source Decima, our mod-
els, and our experimental infrastructure at https://web.mit.edu/decima.
This work does not raise any ethical issues.
Acknowledgments.
We thank our shepherd, Aditya Akella, and the
SIGCOMM reviewers for their valuable feedback. We also thank
Akshay Narayan, Amy Ousterhout, Prateesh Goyal, Peter Iannucci,
and Songtao He for fruitful discussions throughout the development
of this project. We appreciate Haiyang Ding and Yihui Feng from
Alibaba Cloud Intelligence for sharing the production cluster dataset.
This work was funded in part by the NSF grants CNS-1751009,
CNS-1617702, a Google Faculty Research Award, an AWS Machine
Learning Research Award, a Cisco Research Center Award, an Alfred
P. Sloan Research Fellowship, and sponsors of the MIT DSAIL lab.
Learning Scheduling Algorithms for Data Processing Clusters SIGCOMM ’19, August 19-23, 2019, Beijing, China
References
[1]
Martín Abadi, Paul Barham, Jianmin Chen, Zhifeng Chen, Andy Davis, Jeffrey
Dean, Matthieu Devin, Sanjay Ghemawat, Geoffrey Irving, Michael Isard,
Manjunath Kudlur, Josh Levenberg, Rajat Monga, Sherry Moore, Derek G.
Murray, Benoit Steiner, Paul Tucker, Vijay Vasudevan, Pete Warden, Martin
Wicke, Yuan Yu, and Xiaoqiang Zheng. 2016. TensorFlow: A System for
Large-scale Machine Learning. In Proceedings of the 12
th
USENIX Confer-
ence on Operating Systems Design and Implementation (OSDI). 265–283.
http://dl.acm.org/citation.cfm?id=3026877.3026899
[2]
Joshua Achiam, David Held, Aviv Tamar, and Pieter Abbeel. 2017. Constrained
policy optimization. In Proceedings of the 34
th
International Conference on
Machine Learning-Volume 70. 22–31.
[3]
Ravichandra Addanki, Shaileshh Bojja Venkatakrishnan, Shreyan Gupta, Hongzi
Mao, and Mohammad Alizadeh. 2018. Placeto: Efficient Progressive Device
Placement Optimization. In Proceedings of the 1
st
Machine Learning for Systems
Workshop.
[4]
Sameer Agarwal, Srikanth Kandula, Nicolas Bruno, Ming-Chuan Wu, Ion Stoica,
and Jingren Zhou. 2012. Re-optimizing Data-parallel Computing. In Proceedings
of the 9
th
USENIX Conference on Networked Systems Design and Implementation
(NSDI). 281–294. http://dl.acm.org/citation.cfm?id=2228298.2228327
[5]
Kunal Agrawal, Jing Li, Kefu Lu, and Benjamin Moseley. 2016. Scheduling
parallel DAG jobs online to minimize average flow time. In Proceedings of the
27
th
annual ACM-SIAM symposium on Discrete Algorithms (SODA). Society for
Industrial and Applied Mathematics, 176–189.
[6]
Alibaba. 2017. Cluster data collected from production clusters in Alibaba for
cluster management research. https://github.com/alibaba/clusterdata. (2017).
[7]
Dario Amodei and Danny Hernandez. 2018. AI and Compute.
https://openai.com/blog/ai-and-compute/. (2018).
[8]
Apache Hadoop. 2014. Hadoop Fair Scheduler. (2014). http:
//hadoop.apache.org/common/docs/stable1/fair_scheduler.html
[9]
Apache Spark. 2018. Spark: Dynamic Resource Allocation. (2018). http:
//spark.apache.org/docs/2.2.1/job-scheduling.html#dynamic-resource-allocation
Spark v2.2.1 Documentation.
[10] Apache Tez 2013. Apache Tez Project. https://tez.apache.org/. (2013).
[11]
Luiz André Barroso, Jimmy Clidaras, and Urs Hölzle. 2013. The Datacenter
as a Computer: An Introduction to the Design of Warehouse-Scale Machines,
second edition. Synthesis Lectures on Computer Architecture 8, 3 (July 2013).
https://doi.org/10.2200/S00516ED2V01Y201306CAC024
[12]
Peter W. Battaglia, Jessica B. Hamrick, Victor Bapst, Alvaro Sanchez-Gonzalez,
Vinícius Flores Zambaldi, Mateusz Malinowski, Andrea Tacchetti, David Raposo,
Adam Santoro, Ryan Faulkner, Çaglar Gülçehre, Francis Song, Andrew J.
Ballard, Justin Gilmer, George E. Dahl, Ashish Vaswani, Kelsey Allen, Charles
Nash, Victoria Langston, Chris Dyer, Nicolas Heess, Daan Wierstra, Pushmeet
Kohli, Matthew Botvinick, Oriol Vinyals, Yujia Li, and Razvan Pascanu. 2018.
Relational inductive biases, deep learning, and graph networks. arXiv preprint
arXiv:1806.01261 (2018).
[13]
Richard Bellman. 1966. Dynamic programming. Science 153, 3731 (1966), 34–37.
[14]
Yoshua Bengio, Jérôme Louradour, Ronan Collobert, and Jason Weston. 2009.
Curriculum learning. In Proceedings of the 26
th
annual International Conference
on Machine Learning (ICML). 41–48.
[15]
Dimitri P Bertsekas and John N Tsitsiklis. 1995. Neuro-dynamic programming:
an overview. In Decision and Control, 1995., Proceedings of the 34th IEEE
Conference on, Vol. 1. IEEE, 560–564.
[16]
Arka A. Bhattacharya, David Culler, Eric Friedman, Ali Ghodsi, Scott Shenker,
and Ion Stoica. 2013. Hierarchical Scheduling for Diverse Datacenter Workloads.
In Proceedings of the 4
th
Annual Symposium on Cloud Computing (SoCC). Article
4, 15 pages. https://doi.org/10.1145/2523616.2523637
[17]
Christopher M. Bishop. 2006. Pattern Recognition and Machine Learning.
Springer.
[18]
Robert D Blumofe and Charles E Leiserson. 1999. Scheduling multithreaded
computations by work stealing. Journal of the ACM (JACM) 46, 5 (1999), 720–748.
[19]
Craig Chambers, Ashish Raniwala, Frances Perry, Stephen Adams, Robert R.
Henry, Robert Bradshaw, and Nathan Weizenbaum. 2010. FlumeJava: Easy,
Efficient Data-parallel Pipelines. In Proceedings of the 2010 ACM SIGPLAN
Conference on Programming Language Design and Implementation (PLDI).
363–375. https://doi.org/10.1145/1806596.1806638
[20]
Chandra Chekuri, Ashish Goel, Sanjeev Khanna, and Amit Kumar. 2004. Multi-
processor scheduling to minimize flow time with
ε
resource augmentation. In Pro-
ceedings of the 36
th
Annual ACM Symposium on Theory of Computing. 363–372.
[21]
Dilip Chhajed and Timothy J Lowe. 2008. Building intuition: insights from basic
operations management models and principles. Vol. 115. Springer Science &
Business Media.
[22]
Ignasi Clavera, Jonas Rothfuss, John Schulman, Yasuhiro Fujita, Tamim Asfour,
and Pieter Abbeel. 2018. Model-based reinforcement learning via meta-policy
optimization. arXiv preprint arXiv:1809.05214 (2018).
[23]
Hanjun Dai, Elias B. Khalil, Yuyu Zhang, Bistra Dilkina, andLe Song. 2017. Learn-
ing Combinatorial Optimization Algorithms overGraphs. In Proceedings of the 31
st
Conference on Neural Information Processing Systems (NeurIPS). 6348–6358.
[24]
Michaël Defferrard, Xavier Bresson, and Pierre Vandergheynst. 2016. Convolu-
tional Neural Networks on Graphs with Fast Localized Spectral Filtering. arXiv
preprint arXiv:1606.09375 (2016).
[25]
Christina Delimitrou and Christos Kozyrakis. 2013. Paragon: QoS-aware Sched-
uling for Heterogeneous Datacenters. In Proceedings of the 18
th
International
Conference on Architectural Support for Programming Languages and Operating
Systems (ASPLOS). 77–88. https://doi.org/10.1145/2451116.2451125
[26]
Christina Delimitrou and Christos Kozyrakis. 2014. Quasar: Resource-efficient
and QoS-aware Cluster Management. In Proceedings of the 19
th
International
Conference on Architectural Support for Programming Languages and Operating
Systems (ASPLOS). 127–144. https://doi.org/10.1145/2541940.2541941
[27]
Yan Duan, John Schulman, Xi Chen, Peter L Bartlett, Ilya Sutskever, and Pieter
Abbeel. 2016. RL2: Fast Reinforcement Learning via Slow Reinforcement
Learning. arXiv preprint arXiv:1611.02779 (2016).
[28]
Andrew D Ferguson, Peter Bodik, Srikanth Kandula, Eric Boutin, and Rodrigo Fon-
seca. 2012. Jockey: guaranteed job latency in data parallel clusters. In Proceedings
of the 7
th
ACM European Conference on Computer Systems (EuroSys).
[29]
Chelsea Finn, Pieter Abbeel, and Sergey Levine. 2017. Model-Agnostic
Meta-Learning for Fast Adaptation of Deep Networks. In Proceedings of the 34
th
International Conference on Machine Learning (ICML). 1126–1135.
[30]
Peter Geibel. 2006. Reinforcement learning for MDPs with constraints. In Proceed-
ings of the 17
th
European Conference on Machine Learning (ECML). 646–653.
[31]
Ali Ghodsi, Matei Zaharia, Benjamin Hindman, Andy Konwinski, Scott
Shenker, and Ion Stoica. 2011. Dominant Resource Fairness: Fair Allocation
of Multiple Resource Types. In Proceedings of the 8
th
USENIX Sympo-
sium on Networked Systems Design and Implementation (NSDI). 323–336.
http://dl.acm.org/citation.cfm?id=1972457.1972490
[32]
Ali Ghodsi, Matei Zaharia, Scott Shenker, and Ion Stoica. 2013. Choosy:
max-min fair sharing for datacenter jobs with constraints. In Proceedings of
the 8
th
ACM European Conference on Computer Systems (EuroSys). 365–378.
https://doi.org/10.1145/2465351.2465387
[33]
Ionel Gog, Malte Schwarzkopf, Adam Gleave, Robert N. M. Watson, and
Steven Hand. 2016. Firmament: fast, centralized cluster scheduling at scale. In
Proceedings of the 12
th
USENIX Symposium on Operating Systems Design and
Implementation (OSDI). 99–115.
[34]
Robert Grandl, Ganesh Ananthanarayanan, Srikanth Kandula, Sriram Rao,
and Aditya Akella. 2014. Multi-resource Packing for Cluster Schedulers. In
Proceedings of the 2014 ACM SIGCOMM Conference (SIGCOMM). 455–466.
[35]
Robert Grandl, Mosharaf Chowdhury, Aditya Akella, and Ganesh Anantha-
narayanan. 2016. Altruistic Scheduling in Multi-resource Clusters. In Proceedings
of the 12
th
USENIX Conference on Operating Systems Design and Implementation
(OSDI). 65–80. http://dl.acm.org/citation.cfm?id=3026877.3026884
[36]
Robert Grandl, Srikanth Kandula, Sriram Rao, Aditya Akella, and Janardhan
Kulkarni. 2016. Graphene: Packing and dependency-aware scheduling for
data-parallel clusters. In Proceedings of the 12
th
USENIX Symposium on Operating
Systems Design and Implementation (OSDI). 81–97.
[37]
Evan Greensmith, Peter L Bartlett, and Jonathan Baxter. 2004. Variance reduction
techniques for gradient estimates in reinforcement learning. Journal of Machine
Learning Research 5, Nov (2004), 1471–1530.
[38]
Jayesh K Gupta, Maxim Egorov, and Mykel Kochenderfer. 2017. Cooperative
multi-agent control using deep reinforcement learning. In Proceedings of the
2017 International Conference on Autonomous Agents and Multiagent Systems
(AAMAS). 66–83.
[39]
Martin T Hagan, Howard B Demuth, Mark H Beale, and Orlando De Jesús. 1996.
Neural network design. PWS publishing company Boston.
[40]
W Keith Hastings. 1970. Monte Carlo sampling methods using Markov chains
and their applications. Biometrika 1 (1970).
[41]
Benjamin Hindman, Andy Konwinski, Matei Zaharia, Ali Ghodsi, Anthony D
Joseph, Randy H Katz, Scott Shenker, and Ion Stoica. 2011. Mesos: A Platform
for Fine-Grained Resource Sharing in the Data Center. In Proceedings of the 8
th
USENIX Conference on Networked Systems Design and Implementation (NSDI).
[42]
Michael Isard, Mihai Budiu, Yuan Yu, Andrew Birrell, and Dennis Fetterly. 2007.
Dryad: Distributed Data-parallel Programs from Sequential Building Blocks. In
Proceedings of the 2
nd
ACM SIGOPS/EuroSys European Conference on Computer
Systems (EuroSys). 59–72. https://doi.org/10.1145/1272996.1273005
[43]
Michael Isard, Vijayan Prabhakaran, Jon Currey, Udi Wieder, Kunal Talwar, and
Andrew Goldberg. 2009. Quincy: fair scheduling for distributed computing clusters.
In Proceedings of the 22
nd
ACM Symposium on Operating Systems Principles
(SOSP). 261–276. https://doi.org/10.1145/1629575.1629601
[44]
James E. Kelley Jr and Morgan R. Walker. 1959. Critical-path planning and
scheduling. In Proceedings of the Eastern Joint IRE-AIEE-ACM Computer
Conference (EJCC). 160–173.
SIGCOMM ’19, August 19-23, 2019, Beijing, China H. Mao et al.
[45]
Diederik P Kingma and Jimmy Ba. 2015. Adam: A method for stochastic
optimization. Proceedings of the 7
th
International Conference on Learning
Representations (ICLR) (2015).
[46]
Thomas N. Kipf and Max Welling. 2016. Semi-Supervised Classification with
Graph Convolutional Networks. arXiv preprint arXiv:1609.02907 (2016).
http://arxiv.org/abs/1609.02907
[47]
Prasad A. Kulkarni. 2011. JIT compilation policy for modern machines. In ACM
SIGPLAN Notices, Vol. 46. 773–788.
[48]
Tom Leighton, Bruce Maggs, and Satish Rao. 1988. Universal packet routing
algorithms. In Proceedings of the 29
th
annual Symposium on Foundations of
Computer Science (FOCS). 256–269.
[49]
Zhuwen Li, Qifeng Chen, and Vladlen Koltun. 2018. Combinatorial optimization
with graph convolutional networks and guided tree search. In Proceedings of the
32
nd
Conference on Neural Information Processing Systems (NeurIPS). 539–548.
[50]
Eric Liang and Richard Liaw. 2018. Scaling Multi-Agent Reinforcement Learning.
https://bair.berkeley.edu/blog/2018/12/12/rllib/. (2018).
[51]
Timothy P Lillicrap, Jonathan J Hunt, Alexander Pritzel, Nicolas Heess, Tom Erez,
Yuval Tassa, David Silver, and Daan Wierstra. 2015. Continuous control with deep
reinforcement learning. arXiv preprint arXiv:1509.02971 (2015).
[52]
Chengzhi Lu, Kejiang Ye, Guoyao Xu, Cheng-Zhong Xu, and Tongxin Bai. 2017.
Imbalance in the cloud: An analysis on alibaba cluster trace. In Proceedings of the
2017 IEEE International Conference on Big Data (BigData). IEEE, 2884–2892.
[53]
Hongzi Mao, Mohammad Alizadeh, Ishai Menache, and Srikanth Kandula. 2016.
Resource Management with Deep Reinforcement Learning. In Proceedings of the
15
th
ACM Workshop on Hot Topics in Networks (HotNets).
[54]
Hongzi Mao, Shannon Chen, Drew Dimmery, Shaun Singh, Drew Blaisdell,
Yuandong Tian, Mohammad Alizadeh, and Eytan Bakshy. 2019. Real-world
Video Adaptation with Reinforcement Learning. In Proceedings of the 2019
Reinforcement Learning for Real Life Workshop.
[55]
Hongzi Mao, Shaileshh Bojja Venkatakrishnan, Malte Schwarzkopf, and
Mohammad Alizadeh. 2019. Variance Reduction for Reinforcement Learning in
Input-Driven Environments. Proceedings of the 7
th
International Conference on
Learning Representations (ICLR) (2019).
[56]
Ryan Marcus, Parimarjan Negi, Hongzi Mao, Chi Zhang, Mohammad Alizadeh,
Tim Kraska, Olga Papaemmanouil, and Nesime Tatbul. 2019. Neo: A Learned
Query Optimizer. arXiv preprint arXiv:1904.03711 (2019).
[57]
Monaldo Mastrolilli and Ola Svensson. 2008. (Acyclic) job shops are hard to
approximate. In Proceedings of the 49
th
IEEE Symposium on Foundations of
Computer Science (FOCS). 583–592.
[58]
Ishai Menache, Shie Mannor, and Nahum Shimkin. 2005. Basis functionadaptation
in temporal difference reinforcement learning. Annals of Operations Research
134, 1 (2005), 215–238.
[59]
Azalia Mirhoseini, Anna Goldie, Hieu Pham, Benoit Steiner, Quoc V Le, and Jeff
Dean. 2018. A Hierarchical Model for Device Placement. In Proceedings of the
6
th
International Conference on Learning Representations (ICLR).
[60]
Azalia Mirhoseini, Hieu Pham, Quoc V Le, Benoit Steiner, Rasmus Larsen,
Yuefeng Zhou, Naveen Kumar, Mohammad Norouzi, Samy Bengio, and Jeff
Dean. 2017. Device Placement Optimization with Reinforcement Learning. In
Proceedings of the 33
rd
International Conference on Machine Learning (ICML).
[61]
Volodymyr Mnih, Koray Kavukcuoglu, David Silver, Andrei A. Rusu, Joel Veness,
Marc G. Bellemare, Alex Graves, Martin Riedmiller, Andreas K. Fidjeland, Georg
Ostrovski, Stig Petersen, Charles Beattie, Amir Sadik, Ioannis Antonoglou, Helen
King, Dharshan Kumaran, Daan Wierstra, Shane Legg, Demis Hassabis, Ioannis
Antonoglou, Daan Wierstra, and Martin A. Riedmiller. 2015. Human-level control
through deep reinforcement learning. Nature 518 (2015), 529–533.
[62]
Thanh Thi Nguyen, Ngoc Duy Nguyen, and Saeid Nahavandi. 2018. Deep
Reinforcement Learning for Multi-Agent Systems: A Review of Challenges,
Solutions and Applications. arXiv preprint arXiv:1812.11794 (2018).
[63]
Kay Ousterhout, Ryan Rasti, Sylvia Ratnasamy, Scott Shenker, and
Byung-Gon Chun. 2015. Making Sense of Performance in Data Ana-
lytics Frameworks. In Proceedings of the 12
th
USENIX Symposium on
Networked Systems Design and Implementation (NSDI). 293–307. https:
//www.usenix.org/conference/nsdi15/technical-sessions/presentation/ousterhout
[64]
Lerrel Pinto, James Davidson, Rahul Sukthankar, and Abhinav Gupta. 2017. Robust
Adversarial Reinforcement Learning. In Proceedings of the 34
th
International
Conference on Machine Learning (ICML). 2817–2826.
[65]
Chandrasekharan Rajendran. 1994. A no-wait flowshop scheduling heuristic to
minimize makespan. Journal of the Operational Research Society 45, 4 (1994),
472–478.
[66]
Jeff Rasley, Konstantinos Karanasos, Srikanth Kandula, Rodrigo Fonseca, Milan
Vojnovic, and Sriram Rao. 2016. Efficient Queue Management for Cluster
Scheduling. In Proceedings of the 11
th
European Conference on Computer Systems
(EuroSys). Article 36, 15 pages. https://doi.org/10.1145/2901318.2901354
[67]
John Schulman, Sergey Levine, Pieter Abbeel, Michael Jordan, and Philipp Moritz.
2015. Trust region policy optimization. In Proceedings of the 32nd International
Conference on Machine Learning (ICML). 1889–1897.
[68]
Malte Schwarzkopf, Andy Konwinski, Michael Abd-El-Malek, and John Wilkes.
2013. Omega: flexible, scalable schedulers for large compute clusters. In
Proceedings of the 8
th
ACM European Conference on Computer Systems (EuroSys).
351–364.
[69]
David B Shmoys, Clifford Stein, and Joel Wein. 1994. Improved approximation
algorithms for shop scheduling problems. SIAM J. Comput. 23, 3 (1994), 617–632.
[70]
David Silver, Aja Huang, Christopher J. Maddison, Arthur Guez, Laurent Sifre,
George van den Driessche, Julian Schrittwieser, Ioannis Antonoglou, Veda
Panneershelvam, Marc Lanctot, Sander Dieleman, Dominik Grewe, John Nham,
Nal Kalchbrenner, Ilya Sutskever, Timothy Lillicrap, Madeleine Leach, Koray
Kavukcuoglu, Thore Graepel, and Demis Hassabis. 2016. Mastering the game
of Go with deep neural networks and tree search. Nature 529 (2016), 484–503.
[71]
David Silver, Julian Schrittwieser, Karen Simonyan, Ioannis Antonoglou, Aja
Huang, Arthur Guez, Thomas Hubert, Lucas Baker, Matthew Lai, Adrian Bolton,
Yutian Chen, Timothy Lillicrap, Fan Hui, Laurent Sifre, George van den Driessche,
Thore Graepel, and Demis Hassabis. 2017. Mastering the game of Go without
human knowledge. Nature 550, 7676 (2017), 354.
[72]
Richard. S. Sutton and Andrew. G. Barto. 2017. Reinforcement Learning: An
Introduction, Second Edition. MIT Press.
[73] TPC-H 2018. The TPC-H Benchmarks. www.tpc.org/tpch/. (2018).
[74]
Alexey Tumanov, Timothy Zhu, Jun Woo Park, Michael A. Kozuch, Mor
Harchol-Balter, and Gregory R. Ganger. 2016. TetriSched: Global Rescheduling
with Adaptive Plan-ahead in Dynamic Heterogeneous Clusters. In Proceedings
of the 11
th
European Conference on Computer Systems (EuroSys). Article 35,
16 pages. https://doi.org/10.1145/2901318.2901355
[75]
Vinod Kumar Vavilapalli, Arun C. Murthy, Chris Douglas, Sharad Agarwal, Ma-
hadev Konar, Robert Evans, Thomas Graves, Jason Lowe, Hitesh Shah, Siddharth
Seth, Bikas Saha, Carlo Curino, Owen O’Malley, Sanjay Radia, Benjamin Reed,
and Eric Baldeschwieler. 2013. Apache Hadoop YARN: Yet Another Resource
Negotiator. In Proceedings of the 4
th
annual Symposium on Cloud Computing
(SoCC). Article 5, 16 pages. https://doi.org/10.1145/2523616.2523633
[76]
Abhishek Verma, Madhukar Korupolu, and John Wilkes. 2014. Evaluating
job packing in warehouse-scale computing. In Proceedings of the 2014 IEEE
International Conference on Cluster Computing (CLUSTER). 48–56.
[77]
Abhishek Verma, Luis Pedrosa, Madhukar R. Korupolu, David Oppenheimer,
Eric Tune, and John Wilkes. 2015. Large-scale cluster management at Google
with Borg. In Proceedings of the 10
th
European Conference on Computer Systems
(EuroSys). Bordeaux, France.
[78]
Lex Weaver and Nigel Tao. 2001. The optimal reward baseline for gradient-based
reinforcement learning. In Proceedings of the 17
th
Conference on Uncertainty in
Artificial Intelligence (UAI). 538–545.
[79]
Ronald J Williams. 1992. Simple statistical gradient-following algorithms for
connectionist reinforcement learning. Machine learning 8, 3-4 (1992), 229–256.
[80]
Matei Zaharia, Mosharaf Chowdhury, Tathagata Das, Ankur Dave, Justin
Ma, Murphy McCauley, Michael J. Franklin, Scott Shenker, and Ion Sto-
ica. 2012. Resilient Distributed Datasets: A Fault-tolerant Abstraction for
In-memory Cluster Computing. In Proceedings of the 9
th
USENIX Con-
ference on Networked Systems Design and Implementation (NSDI). 15–28.
http://dl.acm.org/citation.cfm?id=2228298.2228301

Learning Scheduling Algorithms for Data Processing Clusters SIGCOMM ’19, August 19-23, 2019, Beijing, China
Appendices
Appendices are supporting material that has not been peer reviewed.
A An example of dependency-aware scheduling
Critical path: 28 + 3ϵ
(# tasks, task duration)
(5, ϵ)
(5, ϵ)
(1, 10)
(40, 1)
(5, ϵ)
(5, 10)
(5, ϵ)
Optimal: 20 + 3ϵ
8 ϵ
10
2ϵ 10
ϵ
Time
Task slots
Time
Task slots
2ϵ 10
ϵ
10
ϵ
Figure 16:
An optimal DAG-aware schedule plans ahead and parallelizes
execution of the blue and green stages, so that orange and green stages
complete at the same time and the bottom join stage can execute immediately.
A straightforward critical path heuristic would instead focus on the right
branch, and takes 29% longer to execute the job.
Directed acyclic graphs (DAGs) of dependent operators or “stages”
are common in parallel data processing applications. Figure 16 shows
a common example: a DAG with two branches that converge in a join
stage. A simple critical path heuristic would choose to work on the
right branch, whichcontains more aggregatework: 90task-seconds vs.
10 task-seconds in the left branch. With this choice, once the orange
stage finishes, however, the final join stage cannot run, since its other
parent stage (in green) is still incomplete. Completing the green stage
next, followed by the join stage — as a critical-path schedule would —
results in an overall makespan of
28+ 3ϵ
. The optimal schedule, by
contrast, completes this DAG in
20+3ϵ
time, 29% faster. Intuitively,
an ideal schedule allocates resources such that both branches reach
the final join stage at the same time, and execute it without blocking.
B Background on Reinforcement Learning
We briefly review reinforcement learning (RL) techniques that we use
in this paper; for a detailed survey and rigorous derivations, see e.g.,
Sutton and Barto’s book [72].
Reinforcement learning.
Consider the general setting in Figure 17,
where an RL agent interacts with an environment. At each step
k
, the
agent observes some state
s
k
, and takes an action
a
k
. Following the
action, the state of the environment transitions to
s
k+1
and the agent
receives a reward
r
k
as feedback. The state transitions and rewards are
stochastic and assumed to be a Markov process: the state transition
to
s
k+1
and the reward
r
k
depend only on the state
s
k
and the action
a
k
at step k (i.e., they are conditionally independent of the past).
In the general RL setting, the agent only controls its actions: it
has no a priori knowledge of the state transition probabilities or the
reward function. However, by interacting with the environment, the
agent can learn these quantities during training.
For training, RL proceeds in episodes. Each episode consists of
a sequence of (state, action, reward) observations— i.e.,
(s
k
,a
k
,r
k
)
at each step
k ∈ [0,1,. . .,T ]
, where
T
is the episode length . For ease of
understanding, we first describe an RL formulation that maximizes
Agent
State
s
k
Neural
network
Policy
π
θ
(s
k
, a
k
)
Environment
Take action a
k
Observe state s
k
Reward r
k
Parameter θ
Figure 17:
A reinforcement learning setting with neural networks [
53
,
72
].
The policy is parameterized using a neural network and is trained iteratively
via interactions with the environment that observe its state and take actions.
the total reward:
E
h
Í
T
k=0
r
k
i
. However, in our scheduling problem,
the average reward formulation (§5.3) is more suitable. We later de-
scribe how to modify the reward signal to convert the objective to the
average reward setting.
Policy.
The agent picks actions based on a policy
π(s
k
,a
k
)
, defined
as a probability of taking action
a
k
at state
s
k
. In most practical
problems, the number of possible
{
state, action
}
pairs is too large
to store the policy in a lookup table. It is therefore common to use
function approximators [
15
,
58
], with a manageable number of ad-
justable parameters,
θ
, to represent the policy as
π
θ
(s
k
, a
k
)
. Many
forms of function approximators can be used to represent the pol-
icy. Popular choices include linear combinations of features of the
state/action space (i.e.,
π
θ
(s
k
,a
k
)= θ
T
ϕ(s
k
,a
k
)
), and, recently, neural
networks [
39
] for solve large-scale RL tasks [
61
,
71
]. An advantage
of neural networks is that they do not need hand-crafted features, and
that they are end-to-end differentiable for training.
Policy gradient methods.
We focus on a class of RL algorithms that
perform training by using gradient-descent on the policy parameters.
Recall that the objective is to maximize the expected total reward; the
gradient of this objective is given by:
∇
θ
E
π
θ
"
T
Õ
k=0
r
k
#
= E
π
θ
"
T
Õ
k=0
∇
θ
logπ
θ
(s
k
,a
k
)Q
π
θ
(s
k
,a
k
)
#
, (4)
where
Q
π
θ
(s
k
,a
k
)
is the expected total discounted reward from (de-
terministically) choosing action
a
k
in state
s
k
, and subsequently fol-
lowing policy
π
θ
[
72
, §13.2]. The key idea in policy gradient methods
is to estimate the gradient using the trajectories of execution with the
current policy. Following the Monte Carlo Method [
40
], the agent
samples multiple trajectories and uses the empirical total discounted
reward,
v
k
, as an unbiased estimate of
Q
π
θ
(s
k
,a
k
)
. It then updates
the policy parameters via gradient descent:
θ ←θ + α
T
Õ
k=0
∇
θ
logπ
θ
(s
k
,a
k
)v
k
, (5)
where
α
is the learning rate. This equation results in the REINFORCE
algorithm [
79
]. The intuition of REINFORCE is that the direction
∇
θ
logπ
θ
(s
k
, a
k
)
indicates how to change the policy parameters in
order to increase
π
θ
(s
k
,a
k
)
(the probability of action
a
k
at state
s
k
).
Equation 5 takes a step in this direction; the size of the step depends
on the magnitude of the return
v
k
. The net effect is to reinforce actions

SIGCOMM ’19, August 19-23, 2019, Beijing, China H. Mao et al.
that empirically lead to better returns. Appendix C describes how we
implement this training method in practice.
Policy gradient methods are better suited to our scheduling context
than the alternative value-basedmethods for tworeasons. First, policy-
based methods are easier to design if it is unclear whether the neural
network architecture used has adequate expressive power. The reason
is that value-based methods aim to find a fixed-point of the Bellman
equations [
13
]. If the underlying neural network cannot express the
optimal value function, then a value-based method can have difficulty
converging because the algorithm is trying to converge to a fixedpoint
that the neural network cannot express. With policy-based methods,
this issue does not arise, because regardless of the policy network’s
expressive power, the policy gradient algorithm will optimize for the
reward objective over the space of policies that the neural network
can express. Second, policy gradient methods allow us to use input-
dependent baselines [
55
] to reduce training variance (challenge #2 in
§5.3). It is currently unknown whether, and how, this technique can
be applied to value-based methods.
Average reward formulation.
For our scheduling problem, an aver-
age reward formulation, which maximizes
lim
T →∞
E
h
1/T
Í
T
k=0
r
k
i
,
is a better objective than the total reward we discussed so far.
To convert the objective from the sum of rewards to the average
reward, we replace the reward
r
k
with a differential reward. Opera-
tionally, at every step
k
, the environment modifies the reward to the
agent as
r
k
←r
k
−
ˆ
r
, where
ˆ
r
is a moving average of the rewards across
alargenumberof previoussteps(across manytraining episodes). With
this modification, we can reuse the same policy gradient method as in
Equation
(4)
and
(5)
to find the optimal policy. Sutton and Barto [
72
,
§10.3, §13.6] describe the mathematical details on how this approach
optimizes the average reward objective.
C Training implementation details
Algorithm 1 presents the pseudocode for Decima’s training procedure
as described in §5.3. In particular, line 3 samples the episode length
τ
from an exponential distribution, with a small initial mean
τ
mean
. This
step terminates the initial episodes early to avoid wasting training
time (see challenge #1 in §5.3). Then, we sample a job sequence (line
4) and use it to collect
N
episodes of experience (line 5). Importantly,
the baseline
b
k
in line 8 is computed with the same job sequence
to reduce the variance caused by the randomness in the job arrival
process (see challenge #2in §5.3). Line10 is the policygradient REIN-
FORCE algorithm described in Eq.
(3)
. Line 13 increases the average
episode length (i.e., the curriculum learning procedure for challenge
#1 in §5.3). Finally, we update Decima’s policy parameter
θ
on line 14.
Our neural network architecture is described in §6.1, and we set
the hyperparameters in Decima’s training as follows. The number of
incoming jobs is capped at 2000, and the episode termination prob-
ability decays linearly from
5×10
−7
to
5×10
−8
throughout training.
The learning rate
α
is
1×10
−3
and we use Adam optimizer [
45
] for
gradient descent. For continuous job arrivals, the moving window for
estimating
ˆ
r
spans
10
5
time steps (see the average reward formulation
in Appendix B). Finally, we train Decima for at least 50,000 iterations
for all experiments.
Weimplemented Decima’s training frameworkusing TensorFlow[
1
],
and we use 16 workers to compute episodes with the same job se-
quence in parallel during training. Each training iteration, including
Algorithm 1 Policy gradient method used to train Decima.
1: for each iteration do
2: ∆θ ← 0
3: Sample episode length τ ∼ exponential(τ
mean
)
4: Sample a job arrival sequence
5: Run episodes i = 1,. . .,N :
{s
i
1
,a
i
1
,r
i
1
,. . .,s
i
τ
,a
i
τ
,r
i
τ
} ∼π
θ
6: Compute total reward: R
i
k
=
Í
τ
k
′
=k
r
i
k
′
7: for k = 1 to τ do
8: compute baseline: b
k
=
1
N
Í
N
i=1
R
i
k
9: for i = 1 to N do
10: ∆θ ← ∆θ + ∇
θ
logπ
θ
(s
i
k
,a
i
k
)(R
i
k
−b
k
)
11: end for
12: end for
13: τ
mean
←τ
mean
+ϵ
14: θ ←θ +α∆θ
15: end for
interaction with the simulator, model inference and model update
from all training workers, takes roughly 1.5 seconds on a machine
with Intel Xeon E5-2640 CPU and Nvidia Tesla P100 GPU.
All experiments in §7 are performed on test job sequences unseen
during training (e.g., unseen TPC-H job combinations, unseen part
of the Alibaba production trace, etc.).
D Simulator fidelity
Our training infrastructure relies on a faithful simulator of Spark job
execution in a cluster.Tovalidatethe simulator’s fidelity, we measured
how simulated and real Spark differ in terms of job completion time
for ten runs of TPC-H job sets (§7.2), both when jobs run alone and
when they share a cluster with other jobs. Figure 18 shows the results:
the simulator closely matches the actual run time of each job, even
when we run multiple jobs together in the cluster. In particular, the
mean error of our simulation is within
5%
of real runtime when jobs
run in isolation, and within
9%
when sharing a cluster (95
th
percentile:
≤ 10% in isolation, ≤ 20% when sharing).
We found that capturing all first-order effects of the Spark envi-
ronment is crucial to achieving this accuracy (§6.2). For example,
without modeling the delay to move an executor between jobs, the
simulated runtime consistently underapproximates reality. Training
in such an environment would result in a policy that moves executors
more eagerly than is actually sensible (§7.4). Likewise, omitting the
effects of initial and subsequent “waves” of tasks, or the slowdown
overheads imposed with high degrees of paralllism, significantly in-
creases the variance in simulated runtime and makes it more difficult
for Decima to learn a good policy.
E Expressiveness of Decima’s state representation
Decima’s can only learn strong scheduling policies if its state repre-
sentation, embedding scheme, and neural network architecture can
express them (§7).
In Equation
(1)
, combining two non-linear transforms
f (·)
and
д(·)
enablesDecima to express a wide variety ofaggregationfunctions. For
example, if
f ∼ log(·/n)
,
д ∼ exp(n×·)
, and
n → ∞
, the aggregation
computes the maximum of the child node embeddings. By contrast,
a standard aggregation operation of the form
e
v
=
Í
u ∈ξ (v)
f (e
u
)

Learning Scheduling Algorithms for Data Processing Clusters SIGCOMM ’19, August 19-23, 2019, Beijing, China
(a) Single job running in isolation.
(b) Mixture of jobs on a shared cluster.
Figure 18:
Testing the fidelity of our Spark simulator with Decima as a
scheduling agent. Blue bars in the upper part show the absolute real Spark job
duration (error bars: standard deviation across ten experiments); the orange
bars in the lower figures show the distribution of simulation error for a
95%
confidence interval. The mean discrepancy between simulated and actual job
duration is at most ±5% for isolated, single jobs, and the mean error for a mix
of all 22 queries running on the cluster is at most ±9%.
0 50 100 150 200 250 300 350
Number of iterations
40%
60%
80%
100%
Testing accuracy
Single non-linear aggregation
Decima's two-level aggregation
Figure 19:
Trained using supervised learning, Decima’s two-level non-linear
transformation is able to express the max operation necessary for computing
the critical path (§5.1), and consequently achieves near-perfect accuracy on
unseen DAGs compared to the standard graph embedding scheme.
without a second non-linear transformation
д(·)
is insufficient to
express the max operation. Consequently, such an architecture cannot
learn the aggregation (max) required to find the critical path of a graph.
During development, we relied on a simple sanity check to test
the expressiveness of a graph embedding scheme. We used super-
vised learning to train the graph neural network to output the critical
path value of each node in a large number of random graphs, and
then checked how accurately the graph neural network identified
the node with the maximum critical path value. Figure 19 shows the
testing accuracy that Decima’s node embedding with two aggregation
levels achieves on unseen graphs, and compares it to the accuracy
achieved by a simple, single-level embedding with only one non-
linear transformation. Decima’s node embedding manages to learn
the max operation and therefore accurately identifies the critical path
after about 150 iterations, while the standard embedding is incapable
of expressing the critical path and consequently never reaches a stable
high accuracy.
F Multi-resource scheduling heuristic comparison details
When evaluating Decima’s performance in a multi-resource set-
ting (§7.3), we compared with several heuristics.
First, we considered the optimally tuned weighted fair heuristic
from §7.2. This heuristic grants each job an executor share based on
the total work in the job. Then the heuristic chooses a stage the same
way as in the single resource setting. Among the available execu-
tor types, the heuristic first exhausts the best-fitting category before
choosing any others. The scheduler ensures that the aggregate allo-
cated resources (across different executor types) do not exceed the
job’s weighted fair share.
Second, we compared to the resource-packing algorithm from
Tetris [
34
]. To maximize resource utilization, we select the DAG node
that yields the largest dot product of the requested resource vector
and the available resource vector for each executor type. Then, we
greedily grant as much parallelism as the tasks in this node need.
The prior two heuristics lack each other’s key scheduling ingredi-
ents (fairness and packing), and neither understands the DAG struc-
ture. Finally, we compared to Graphene [
36
], whose hybrid heuristic
combines these factors. However, our multi-resource scheduling en-
vironment with discrete executor classes differs from the original
Graphene setting, which assumes continuous, infinitely divisible re-
sources. We adapted the Graphene algorithm for discrete executors,
but kept its essence: specifically, we estimate and group the “trouble-
some” nodes the same way [
36
, §4.1]. To ensure that troublesome
nodes are scheduled at the same time, we dynamically suppress the
priority on all troublesome nodes of a DAG until all of these nodes are
available in thefrontier. Wealsoinclude parallelism controlby sharing
the executors according to the optimally tuned weighted fair partition
heuristic; and we pack resources by prioritizing the executor type that
best fits the resource request. Finally, we perform a grid search on
all the hyperparameters (e.g., the threshold for picking troublesome
nodes) to tune the heuristic for the best scheduling performance in
each of the experiments (§7.3).
G Further analysis of multi-resource scheduling
In §7.3, we found that Decima achieves
32% − 43%
lower average
JCT than state-of-the-art heuristics when handling continuous job
arrivals in a multi-resource environment. Decima achieves this by
carefully fragmenting cluster memory: Figure 12b illustrated that
Decima selectively borrows large executors if they can help finishing
short jobs quickly and increase cluster throughput.
This effect is also evident when examining the timeseries of job du-
ration and executor usage over a single experiment. Figure 20 shows
that Decima maintains a smaller number of concurrent active jobs
during periods of high load both for a synthetic TPC-H workload and
for the Alibaba trace. During busy periods (e.g., around snapshot 50
in Figure 20a1), Decima clears the backlog of jobs in the queue more
quickly than the best competing heuristic, Graphene
∗
. During these
periods, Decima assigns more executors to each job than Graphene
∗
(Figures 20a2 and 20b2), e.g., by sometimes borrowing large execu-
tors for jobs that need only smaller ones. As a consequence, Decima

SIGCOMM ’19, August 19-23, 2019, Beijing, China H. Mao et al.
(2)
(3)
(1)
(a) TPC-H workload.
(3)
(1)
(2)
(b) Industrial trace replay.
Figure 20:
Timeseries of different statistics in the extended Spark multi-
resource environment. We compare Decima and Graphene
∗
, the best
competing heuristic. During busy periods, Decima finishes jobs faster and
maintains a lower number of concurrent jobs by using more executors per job.
achieves lower JCT and higher cluster throughput when the cluster
load is high (Figures 20a3 and 20b3).
Figure 21a and 21b compare the executor assignment between
Decima and Graphene
∗
in detail (Figure 12b is the first column of
this profile). On the
x
-axis, we bin jobs according to the total amount
of work they contain (in task-seconds). The
y
-axis of each graph is
the number of executors Decima uses normalized to the number of
executors used by Graphene
∗
— i.e., a value above one indicates
that Decima used more executors. Overall, Decima tends to assign
more executors per job compared to Graphene
∗
. This helps Decima
complete jobs faster in order to then move on to others, instead of
making progress on many jobs concurrently, similar to the behavior
we discussed in §7.2. Moreover, Decima uses more large executors
on small jobs. This aggressive allocation of large executors — which
wastes some memory — leads to faster job completion during the
busy periods (Figure 20a3 and 20b3), at the expense of leaving some
memory unused. This trade-off between resource fragmentation and
prioritizing small jobs can be tedious to balance, but Decima automat-
ically learns a strong policy by interacting with the environment.
Decima may enjoy an advantage here partly because Graphene
∗
is restricted to discrete executor classes. In a cluster setting with
arbitrary, continuous memory assignment to tasks, large executor
“slots” could be subdivided into multiple smaller executors, assuming
sufficient CPU capacity exists. This choice is difficult to express with
a finite action space like Decima’s, and it is an interesting direction for
future work to investigate whether RL with continuous action could
be applied to cluster scheduling.
H Optimality of Decima
In §7, we show Decima is able to rival or outperform existing schedul-
ing schemes in a wide range of complex cluster environments, includ-
ing a real Spark testbed, real-world cluster trace simulations and a
multi-resource packing environment. However, the optimality of Dec-
ima in those environments remains unknown due to the intractability
of computing exact optimal scheduling solutions [
36
,
57
], or tight
(1)
(2)
(3)
(4)
(a) TPC-H workload.
(1)
(2)
(3)
(4)
(b) Industrial trace replay.
Figure 21:
Profile of executor assignments on jobs with different sizes,
Decima normalized to Graphene
∗
’s assignment (>1: more executors in
Decima, <1: more in Graphene
∗
). Decima tends to assign more executors.
lower bounds.
9
To nevertheless get an idea of how close Decima
comes to an optimal scheduler, we test Decima in simplified settings
where a brute-force search over different schedules is possible.
We consider the Spark scheduling framework simulated in §6.2
with an average JCT objective for a batch of jobs. To simplify the
environment, we turn off the “wave” effect, executor startup delays
and the artifact of task slowdowns at high degrees of parallelism. As a
result, the duration of a stage has a strict inverse relation to the number
of executors the stage runs on (i.e., it scales linearly with parallel
resources), and the scheduler is free to move executors across jobs
without any overhead. The dominating challenges in this environment
are to pack jobs tightly and to favor short jobs as much as possible.
Tofind a goodschedulefor a batch of
n
jobs,we exhaustively search
all
n!
possible job orderings, and select the ordering with the lowest
average JCT. To make the exhaustive search feasible, we consider
a batch of ten jobs. For each job ordering, we select the unfinished
job appearing earliest in the order at each scheduling event (§5.2),
and use the DAG’s critical path to choose the order in which to finish
stages within each job. By considering all possible job orderings,
the algorithm is guaranteed to consider, amongst other schedules,
a strict shortest-job-first (SJF) schedule that yields a small average
JCT. We believe this policy to be close to the optimal policy, as we
have empirically observed that job orderings dominate the average
JCT in TPC-H workloads (§7.4). However, the exhaustive search also
explores variations of the SJF schedule, e.g., orders that prioritize
9
In our setting (i.e., Spark’s executor-based scheduling), we found lower bounds based
on total work or the critical path to be too loose to provide meaningful information.

Learning Scheduling Algorithms for Data Processing Clusters SIGCOMM ’19, August 19-23, 2019, Beijing, China
Figure 22:
Comparing Decima with near optimal heuristics in a simplified
scheduling environment.
Decima training scenario average JCT (seconds)
Decima trained with test setting 3, 290±680
Decima trained with 15× fewer jobs 3, 540±450
Decima trained with test setting 610±90
Decima trained with 10× fewer executors 630 ±70
Table 3:
Decima generalizes well to deployment scenarios in which the
workload or cluster differ from the training setting. The test setting has 150
jobs and 10k executors.
jobs which can exploit parallelism to complete more quickly than
less-parallelizable jobs that contain smaller total work.
Next, we train an unmodified Decima agent in this environment,
similar to the setup in §7.2. We compare this agent’s performance
with our exhaustive search baseline, a shortest-job-first critical-path
heuristic, and the tuned weighted fair scheduler (described in §7.2).
Figure 22 shows the results. We make three key observations. First,
unlike in the real Spark cluster (Figure 9), the SJF-CP scheme outper-
forms the tuned weighted fair scheduler. This meets our expectation
because SJF-CP strictly favors small jobs to minimize the average
JCT,which in the absence of the complexities of a real-world cluster is
a good policy. Second, the exhaustive search heuristic performs better
than SJF-CP. This is because SJF-CP strictly focuses on completing
the job with the smallest total work first, ignoring the DAG structure
and the potential parallelism it implies. The exhaustive search, by
contrast, finds job orderings that prioritize jobs which can execute
most quickly given the available executors on the cluster, their DAG
structure, and their total work. While the search algorithm is not aware
of these constraints, by trying out different job orderings, it finds the
schedule that both orders jobs correctly and exploits cluster resources
to complete the jobs as quickly aspossible. Third, Decima matches the
average JCT of the exhaustive search or even outperforms it slightly
(by
9%
on average). We found that Decima is better at dynamically
prioritizing jobs based on their current structure at runtime (e.g., how
much work remains on each dependency path), while the exhaustive
search heuristic strictly follows the order determined in an offline
static search and only controls when jobs start. This experimentshows
that Decima is able to automatically learn a scheduling algorithm that
performs as well as an offline-optimal job order.
I Generalizing Decima to different environments
Real-world cluster workloads vary over time, and the available cluster
machines can also change. Ideally, Decima would generalize from a
Figure 23:
Decima performs worse on unseen jobs without task duration
estimates, but still outperforms the best heuristic.
model trained for a specific load and cluster size to similar workloads
with different parameters. To test this, we train a Decima agent on
a scaled-down version of the industrial workload, using 15
×
fewer
concurrent jobs and 10× fewer executors than in the test setting.
Table 3 shows how the performance of this agent compares with
that of one trained on the real workload and cluster size. Decima is
robust to changing parameters: the agent trained with 15
×
fewer jobs
generalizes to the test workload with a 7
%
reduced average JCT, and
an agent trained on a 10
×
smaller cluster generalizes with a 3
%
reduc-
tion in average JCT. Generalization to a larger cluster is robust as the
policy correctly limits jobs’ parallelism even if vastly more resources
are available. By contrast, generalizing to a workload with many more
jobs is harder, as the smaller-scale training lacks experiences with
complex job combinations.
J Decima with incomplete information
In a real cluster, Decima will occasionally encounter unseen jobs
without reliable task duration estimates. Unlike heuristics that funda-
mentally rely on profiling information (e.g., weighted fair scheduling
based on total work), Decima can still work with the remaining infor-
mation and extract a reasonable scheduling policy.
Running the same setting as in §7.2, Figure 23 shows that training
without task durations yields a policy that still outperforms the best
heuristic, as Decima can still exploit the graph structure and other
information such as the correlation between number of tasks and the
efficient parallelism level.
